Available in: Block Coding, Python Coding
Mode: Stage Mode, Upload Mode
WiFi Required: No
Compatible Hardware in Block Coding: Quarky
Compatible Hardware in Python: Quarky
Object Declaration in Python: roboticArm = RoboticArm(1, 2, 3, 4)
Extension Catergory: Quarky
Available in: Block Coding, Python Coding
Mode: Stage Mode, Upload Mode
WiFi Required: No
Compatible Hardware in Block Coding: Quarky
Compatible Hardware in Python: Quarky
Object Declaration in Python: roboticArm = RoboticArm(1, 2, 3, 4)
Extension Catergory: Quarky
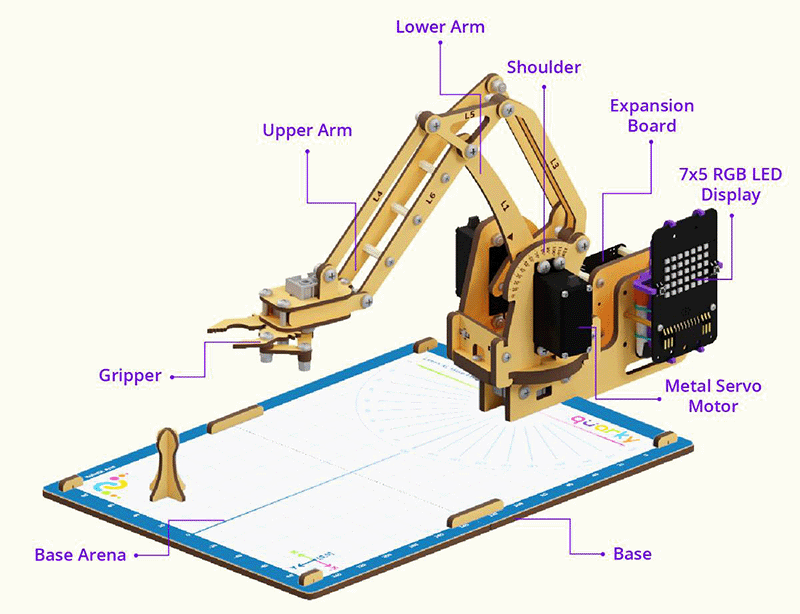
The extension allows you to control the Quakry 3DOF (Degree of Freedom) Robotic Arm with Gripper using blocks and Python functions.