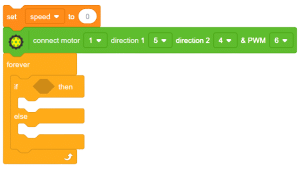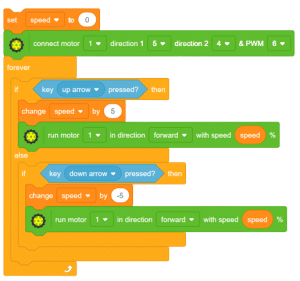



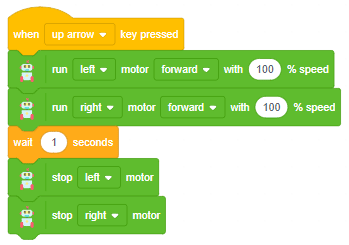
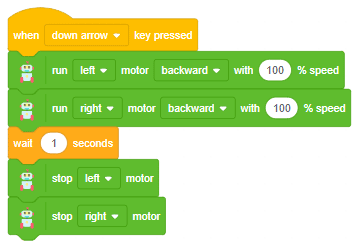
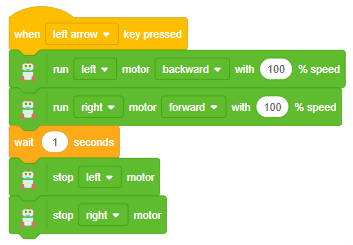
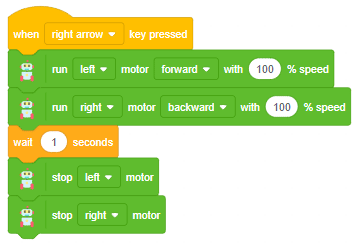
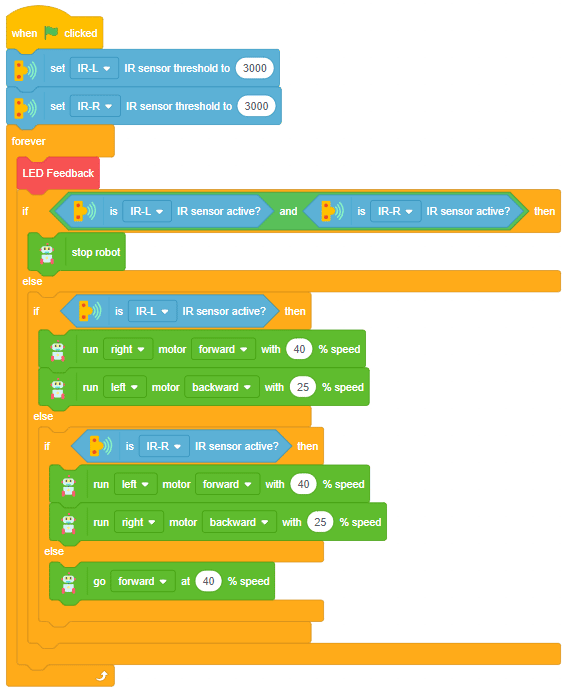
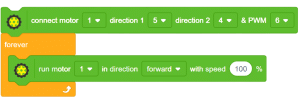
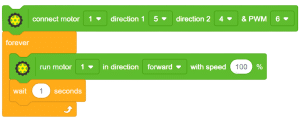
The block sets the specified motor of the Quarky robot to the specified direction (“FORWARD” or “BACKWARD”) and specified speed.

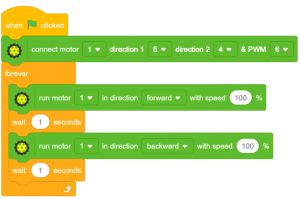
The block sets the specified motor of the Quarky robot to the specified direction (“FORWARD” or “BACKWARD”) and specified speed.



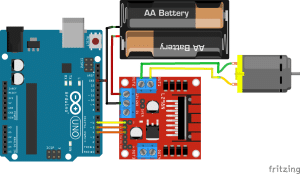
Arduino Uno is a controlling device which is capable to control the things we are connected to it, it is not a power source. motors works on the principle of electromagnetism so draws a lot of load current which can’t be maintained by Arduino, for this we need a motor driver which is integrated circuited (IC) which maintains this load current for the motors.

this is of 16 pin chip among which 2 are enable pins used to control the speed of the motor, 4 for the input pins are 4 for output pins for the motors, remaining are GND and VCC.
connection.
Arduino uno Motor driver
D5 IN1
D4 IN2
D6 EN1
GND GND
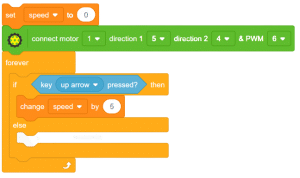
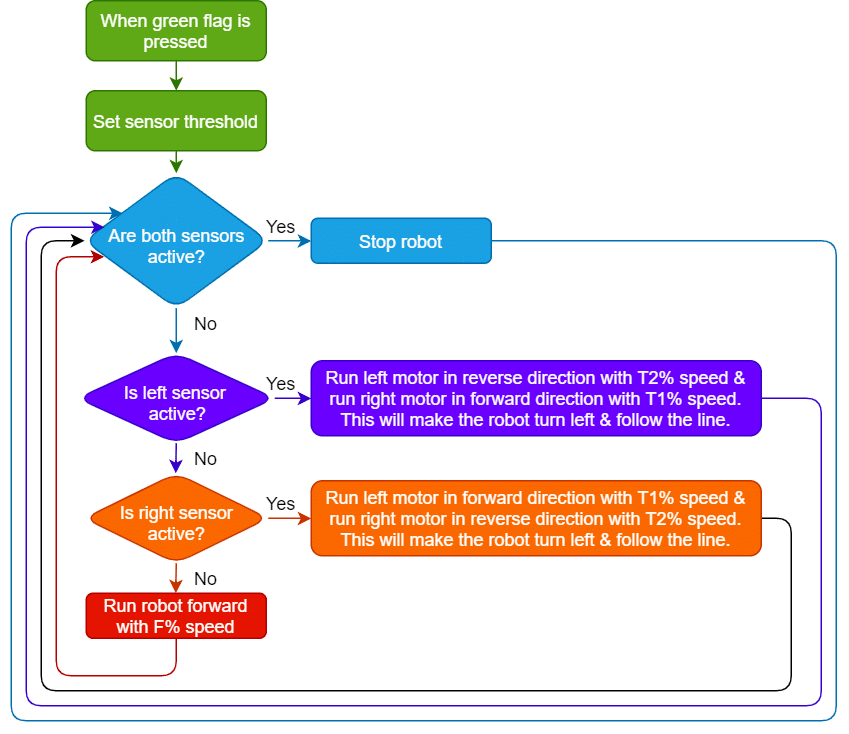
In this example, we will be controlling the direction of rotation of the motor using the motor driver.
Arduino is a controlling device not a power source on the other hand, motors work on the principle of electromagnetism and hence draw a lot of load current which can’t be maintained by Arduino. To overcome this, we need a motor driver which maintains this load current along with the speed and direction control of the motor.
connections
connection.
Arduino uno Motor driver
D5 IN1
D4 IN2
D6 EN1
GND GND

![]()