





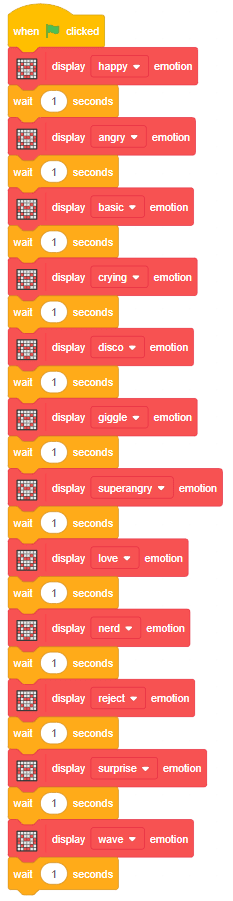
The block displays the specified emotions on the Quarky RGB LED. These emotions are static and predefined in the code.
The block displays the specified emotions on the Quarky RGB LED. These emotions are static and predefined in the code.
The project demonstrates how to make the Quadruped detect the hand in front of it and move according.
The logic is simple. If the distance measured from the ultrasonic sensor is less the robot will move toward the hand. Else the robot will lean backward.


If the distance measured from the ultrasonic sensor is less the robot will face upwards towards the hand. Else the robot will look downward.