


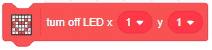


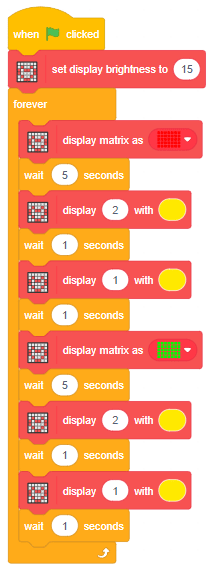
The block displays the specified character on the Quarky RGB LED.
The block has the following inputs:
- Character to be displayed on the LEDs.
- Color of the RGB LED when displaying.

The block displays the specified character on the Quarky RGB LED.
The block has the following inputs:
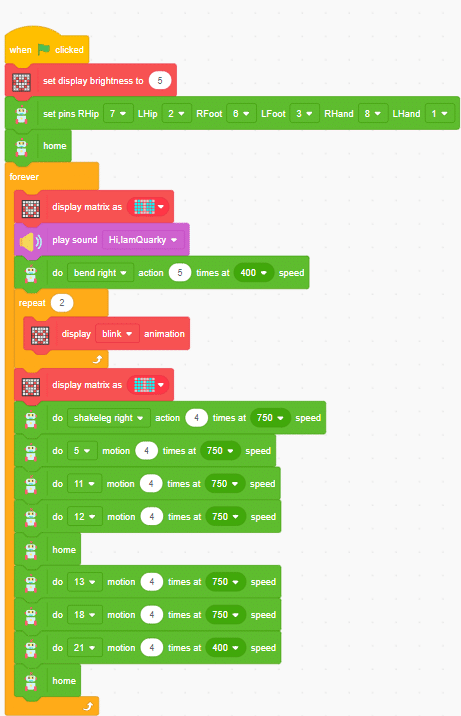
Dance motion with humanoid refers to using a robot that has a human-like appearance to perform dance movements. These robots are pre-programmed with various dance sequences and can also be customized to create unique dance routines.
To make the robot move, we need to use code to control its motors and servos. The code can be created using a programming tools/language such Pictoblox, Python, or Arduino. The code tells the robot which movements to make, such as lifting its arms, bending its knees, or spinning around.
Different actions can be used to create different dance moves, and the dance can be accompanied by music or sound effects. The robot can also be programmed to display different colors or patterns on its body as it moves.
Humanoid robots is a fun and creative way to explore the intersection between technology and the arts.
In this activity, students will program Quarky to detect a face’s position using the camera and respond with movements. Based on which direction the face is (left, right, or center), Quarky will display a pattern and move accordingly. This teaches camera-based input, angle calculations, and conditional movements.
![]()


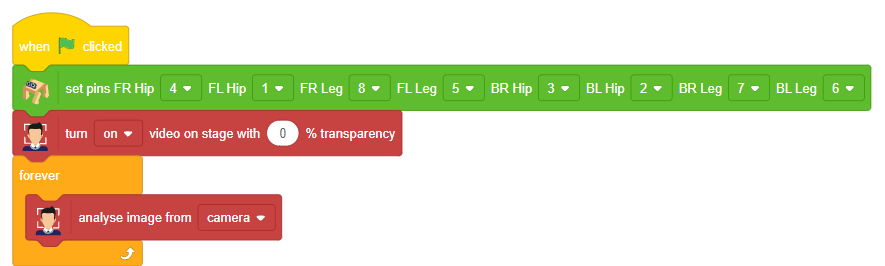
90 + (x position of face ÷ 3) to decide how far the face is from the center.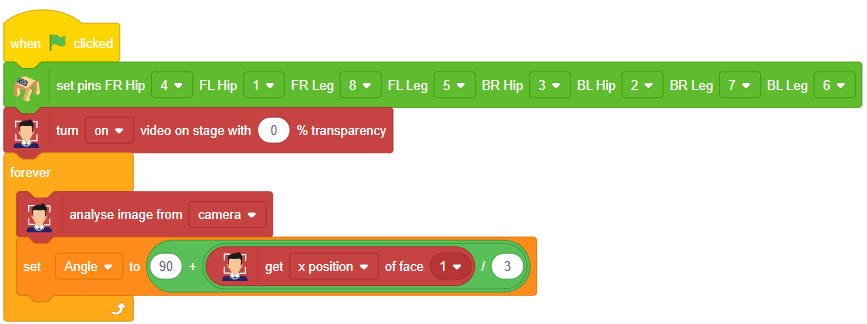
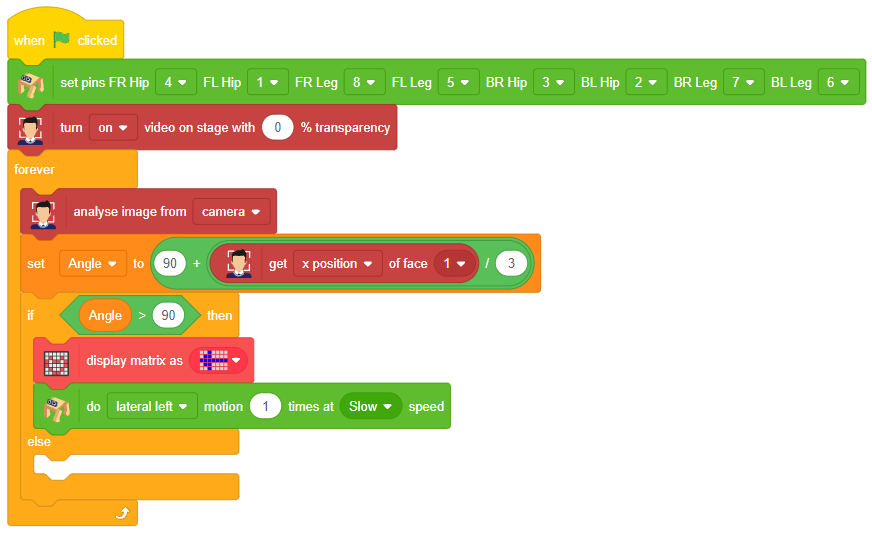
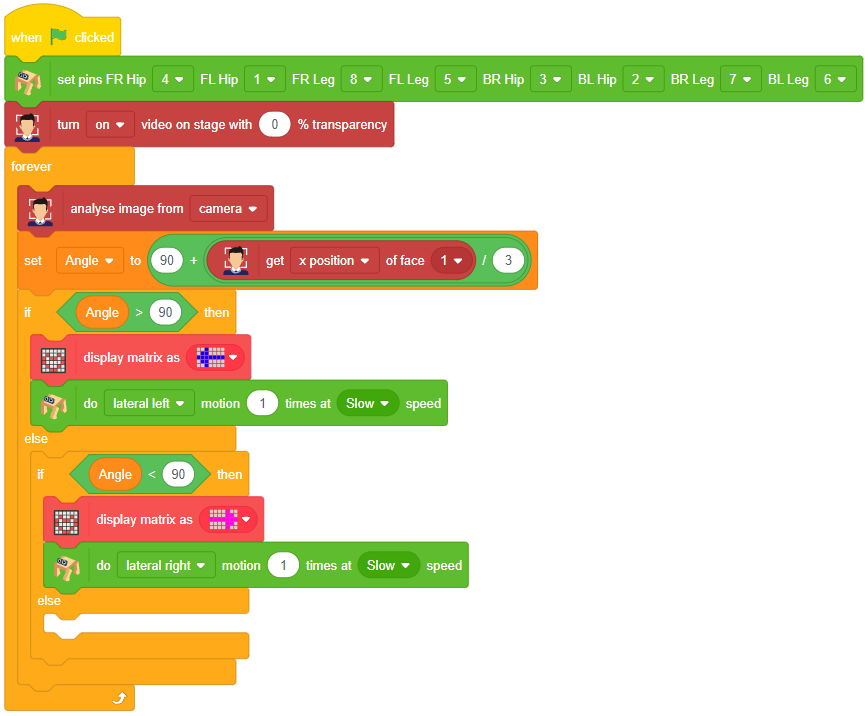
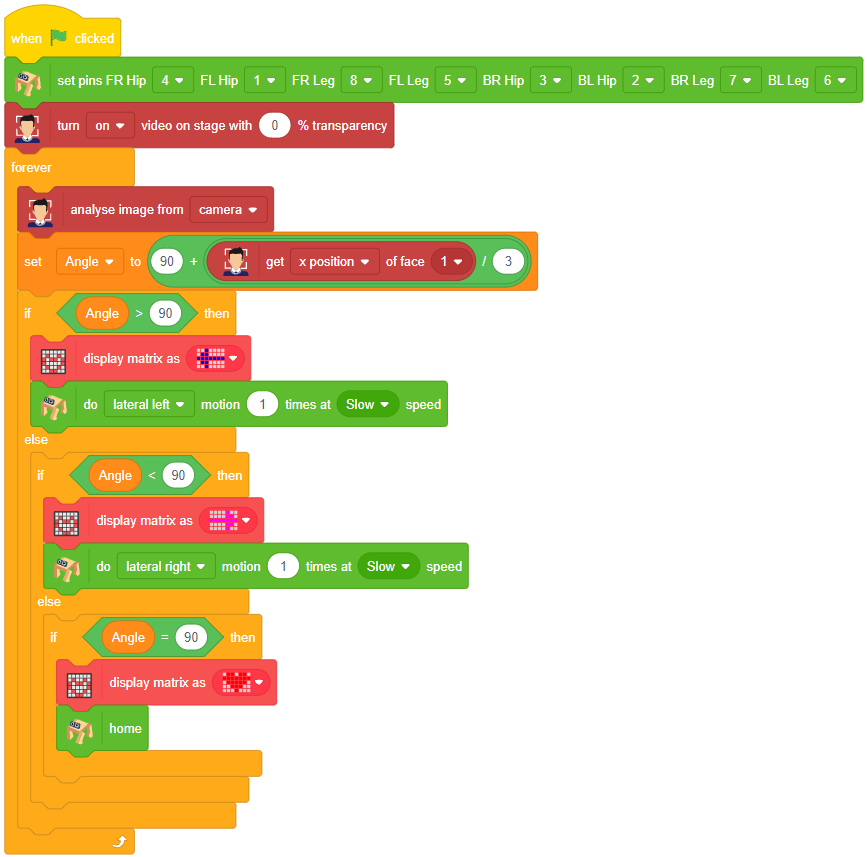

Our next step is to check whether it is working right or not. Whenever your face will come in front of the camera, it should detect it and as you move to the right or left, the head of your Quadruped robot should also move accordingly.
![]()