










Set offset along length () & Z () block is a stack block available in the Robotic Arm extension for evive and other Arduino Boards. This block adds the offset on the end effector position along the specified length direction i.e. the direction in which the robotic arm is facing and the Z direction. The block is mainly used to calibrate the end-effector with respect to the base.

Note: This block is available in both Stage Mode and Upload mode.
Input Parameters
- The offset of the end-effector from the center of the robotic base.
- The offset of the end-effector from the ground.
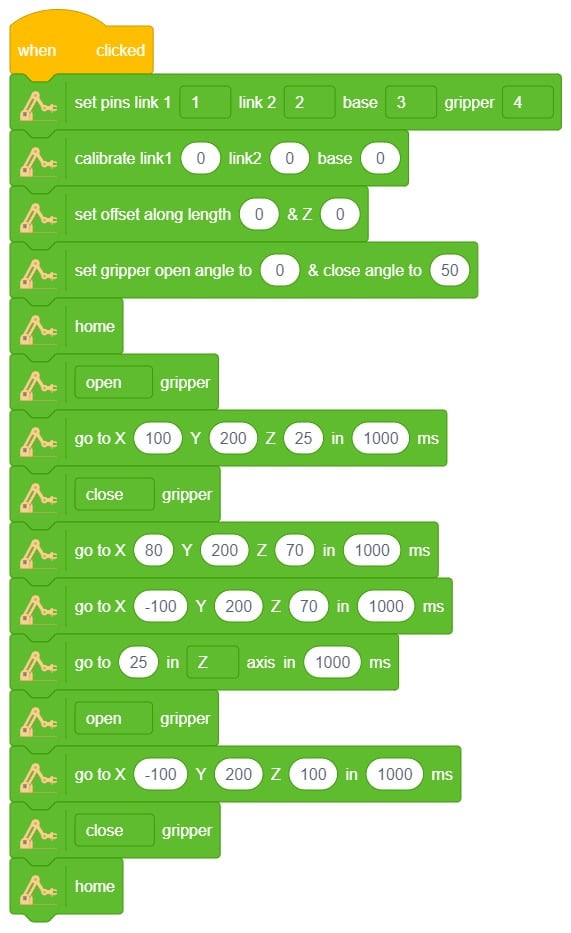
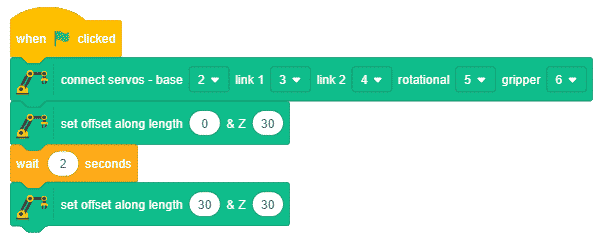
Example
In this example, we’ll first bring the end-effector closer to the base by 30mm and then bring the end effector closer to the center by 30mm.
- Define PWM pins for the servos connected.
- First, to bring the end-effector closer to the base, change the Z offset by 30.
- Next, to bring the end-effector closer to the base, change the length offset by 30.
Before working with the Robotic Arm, we need to calibrate the robotic arm. To calibrate the robotic arm, click here.