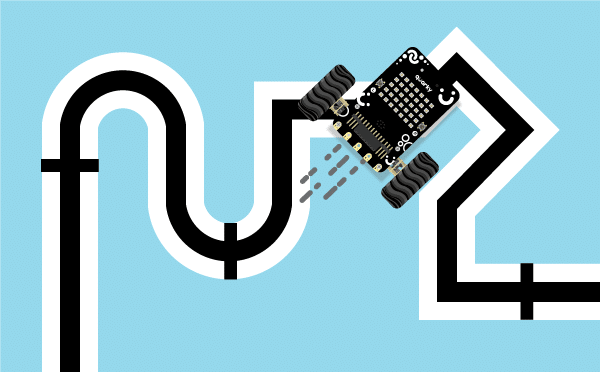








The parameters in this block are the same as the regular line following blocks in the “Robot Extension” of the Quarky board. They define the speeds of motors in different scenarios while following the black line on a white path.
F: The speed with which the robot moves forward when both detect white.
T1 and T2: Speeds of the forward and reverse moving motors respectively to turn the robot along the black line gently.
