
() motor () block is a stack block available in actuators extension for evive and all Arduino boards. The block free or locks the motor connected to the selected slot from evive, Arduino Uno, Mega & Nano.
Input Parameters
- Motor stopping action:
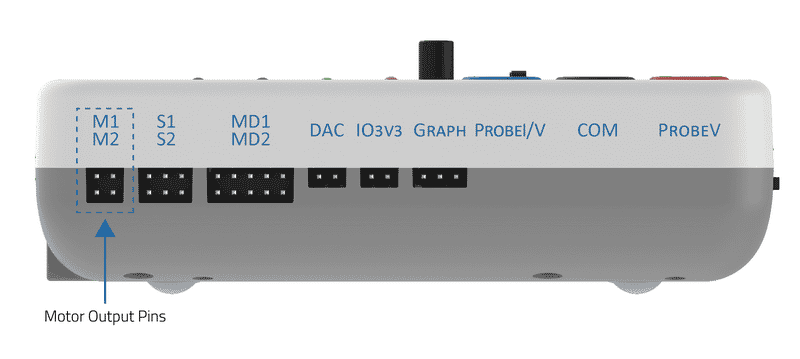
- Lock: This means that both the motor output pins will be HIGH, resulting in stopping the motor. But in this case, the motor also resists any rotational movement. This is like the brake.
- Free: This means that both the motor output pins will be LOW, resulting in stopping the motor. But in this case, the motor if free for any rotational movement. This is like the clutch.
- Motor channel:
- evive: The motor channel can be motor channel 1 or motor channel 2.
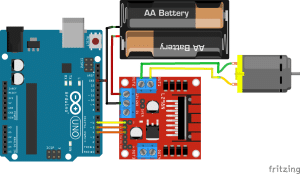
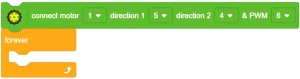
- Arduino Uno, Mega, and Nano: The motor channel can be 1-4 depending on which channel has been initialized previously using connect motor () direction 1 () direction 2 () & PWM () block.
- evive: The motor channel can be motor channel 1 or motor channel 2.

Note: This block is available in both Upload mode and Stage mode.
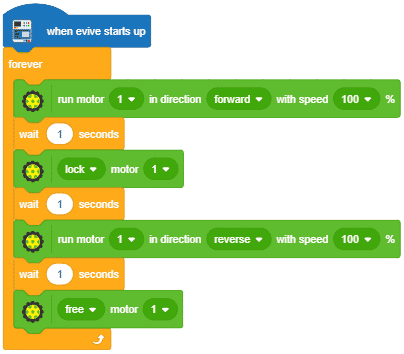
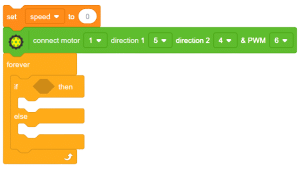
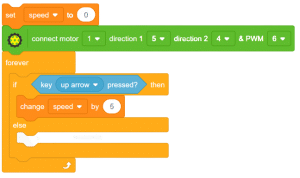
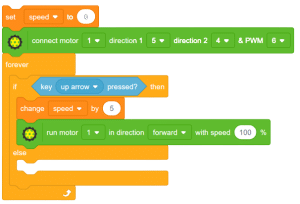
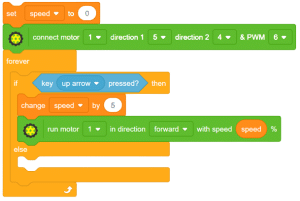
Example
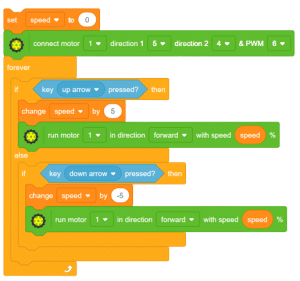
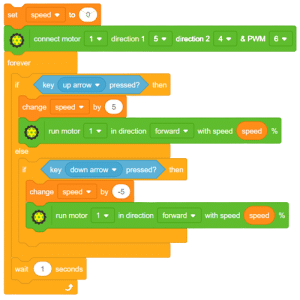
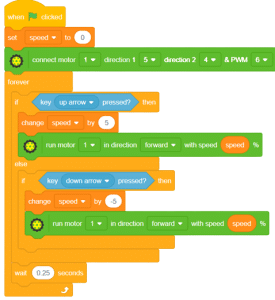
- This script locks and frees the motor.