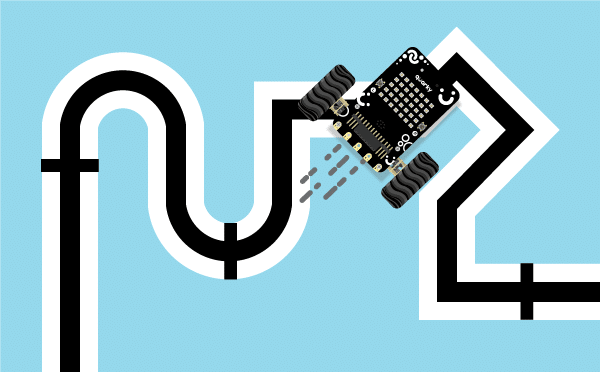









The robot performs line following until several junctions/checkpoints on the line following arena is detected i.e. until it detects black on both IR Sensors simultaneously.
Note: This block will not work on a junction as both IR Sensors detect black initially itself!
