The Quarky Mini Expansion Board extension enables users to control the motor, PWM, and other I/O functions. This extension allows for seamless interaction with motors, sensors, and actuators to build robotics projects.
Using this extension, you can:
- Initialize and activate the Quarky Mini Expansion Board.
- Set the PWM pin output value (0-255).
- Run motors in forward or backward directions with a defined speed (0-100).
- Control motors for a specific duration and then stop automatically.
- Run Motor-1 and Motor-2 simultaneously with independent speed control.
- Stop specific motors immediately.
- Reverse motor direction for dynamic movement control.
- Move the robot forward, backward, left, or right at a specified speed.
- Stop the robot.
This extension is ideal for robotics projects, automation, and motor control applications.
Connecting Quarky with PictoBlox
Let’s begin by first connecting Quarky to PictoBlox. Select your preferred type of device. Follow the steps below for connecting Quarky to PictoBlox:
- First, connect Quarky to your laptop using a USB cable.
- Next, open PictoBlox on your desktop.
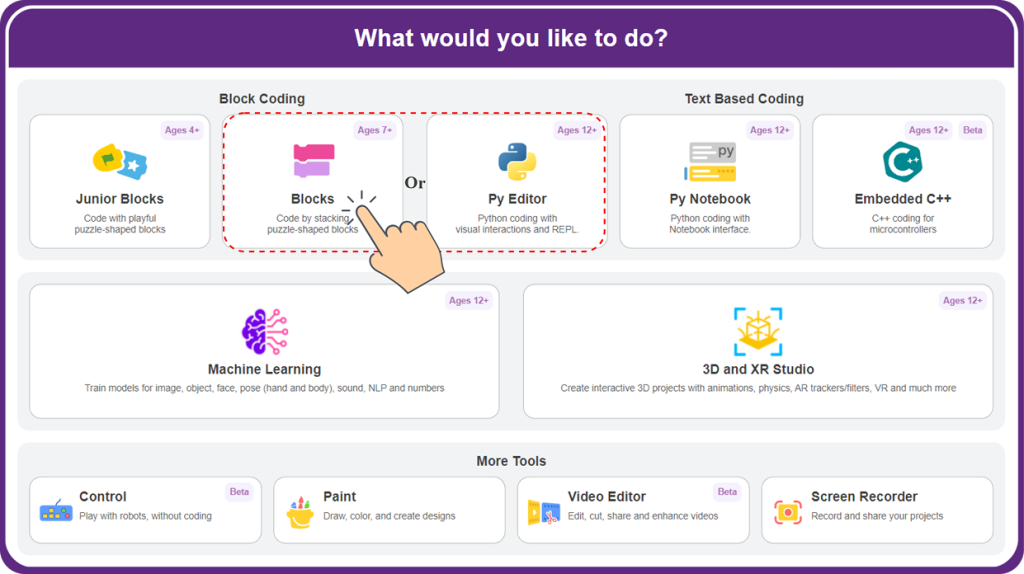
- After that, select Block or Python Coding as your coding environment.
- Then, click the Board button in the toolbar and select board as Quarky.
- Next, select the appropriate Serial port if the Quarky is connected via USB or the Bluetooth Port if you want to connect the Quarky via Bluetooth, and press Connect.
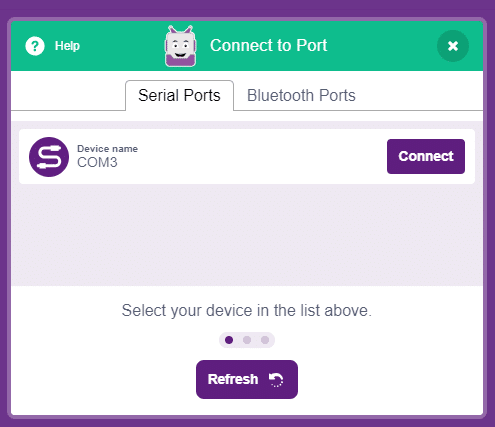
Quarky is now connected to PictoBlox.
Connecting Quarky Intellio with PictoBlox
Let’s begin by first connecting Quarky Intellio to PictoBlox. Follow the step-by-step instructions in the Quarky Intellio Connection Guide to establish the connection.
Refer to the guide here: