How to synchronize the Quarky motor’s speed (RPM)?
Follow the instructions to synchronize the motor’s speed using PictoBlox:
Step 1: Access Quarky Settings: Open the Quarky Palette and navigate to the Quarky Settings section.
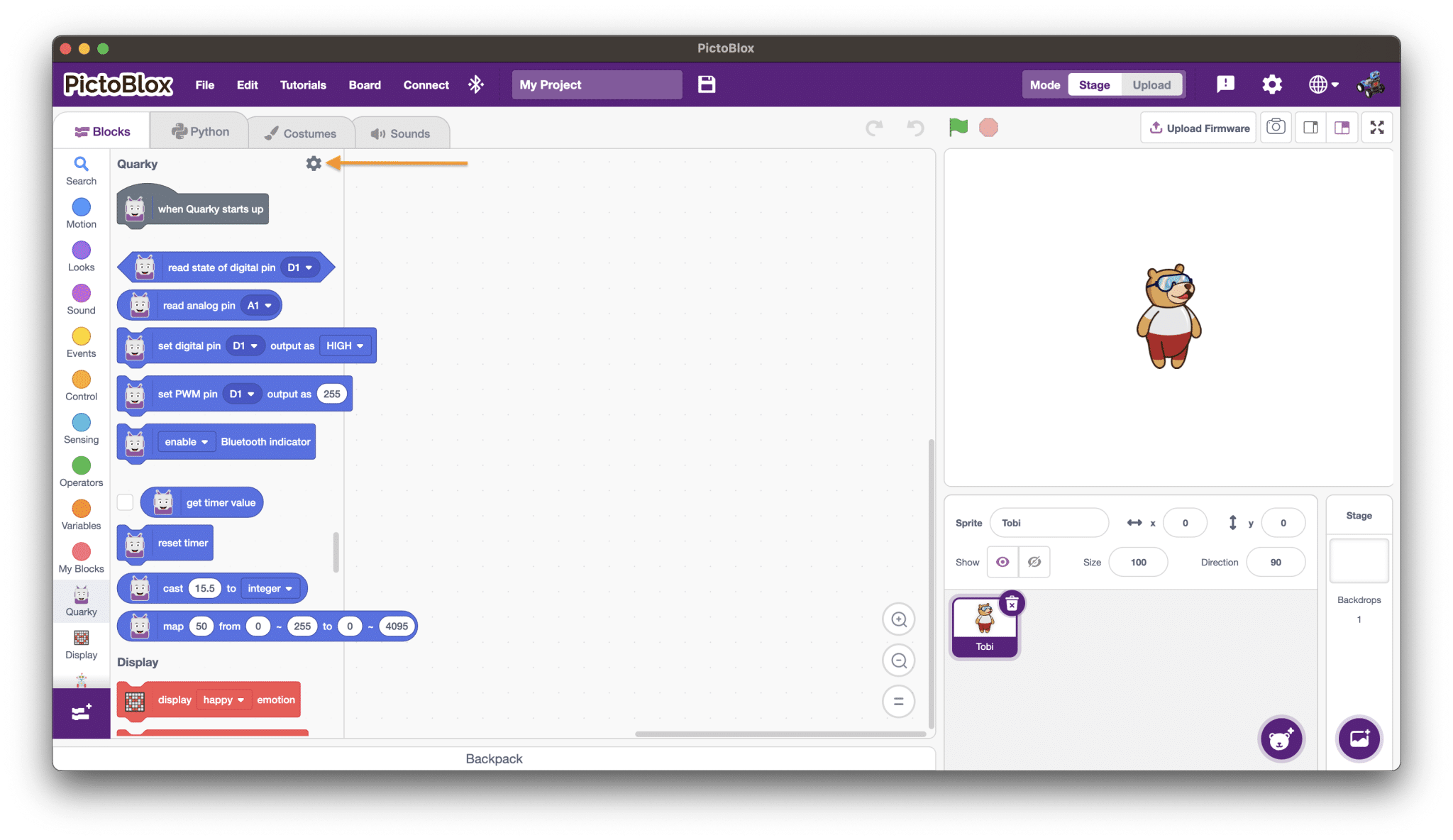
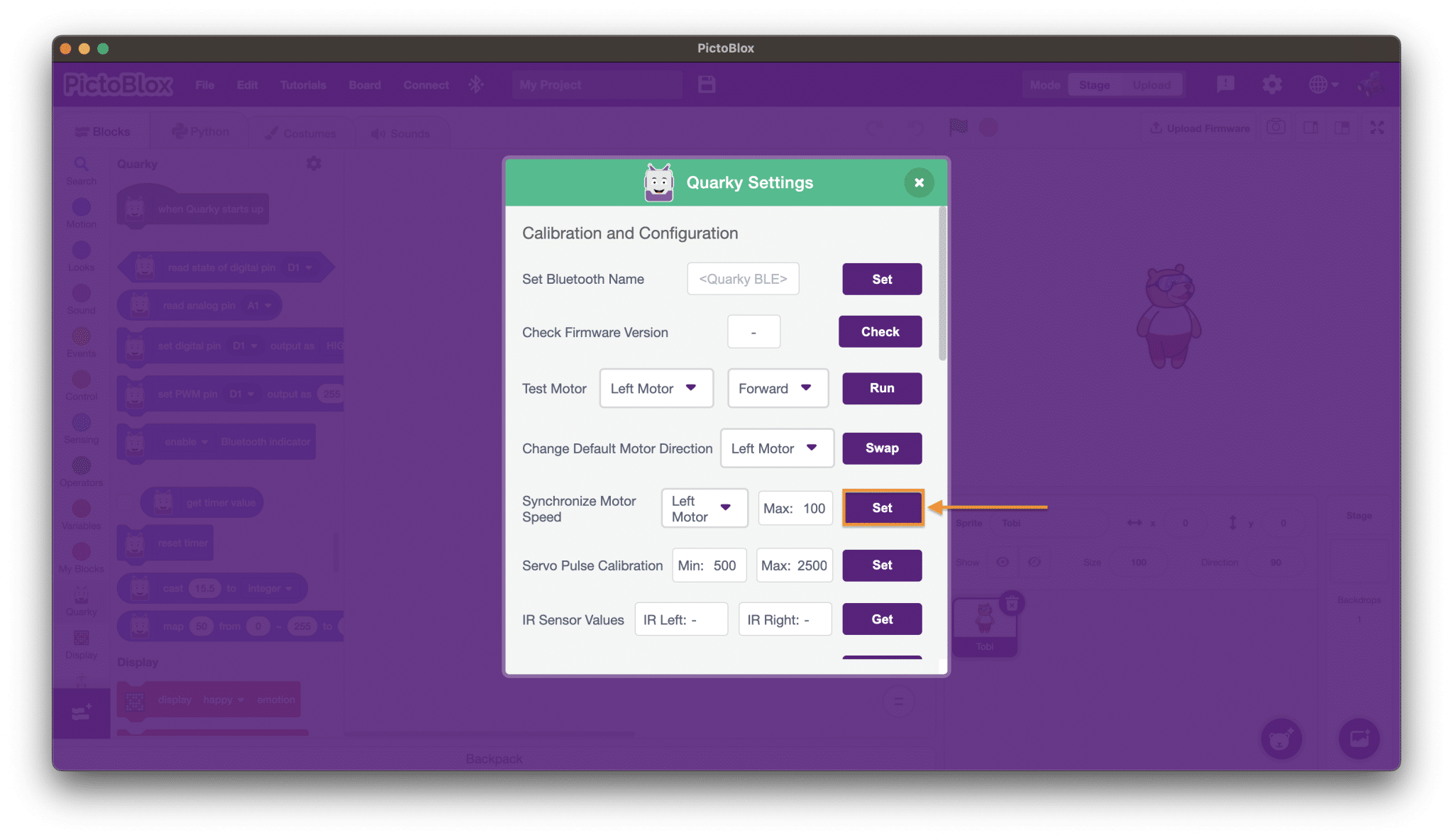
Step 2: Calibration and Configuration: Within the calibration and configuration options, locate the setting for synchronized motor speed.
Step 3: Adjust Motor Speed: Modify the motor speed and make necessary adjustments to calibrate and synchronize the motors.
By following these steps, you can synchronize the Quarky motors by adjusting the motor speed in the Quarky Settings section.
What is the motor type?
Quarky is equipped with an N20 DC Geared motor. On average, this motor operates at a speed of 30-60 RPM (Rotations Per Minute) at operating voltage of 3.3V-4.2V and provides a torque of 0.5 Kg/cm.
What is the maximum speed and torque of the motor?
The motor used in Quarky has an average speed of 36-40 RPM (Rotations Per Minute) and provides a torque of 0.5 Kg/cm.
How to fix the motor rotation if the motors are rotating in the wrong direction?
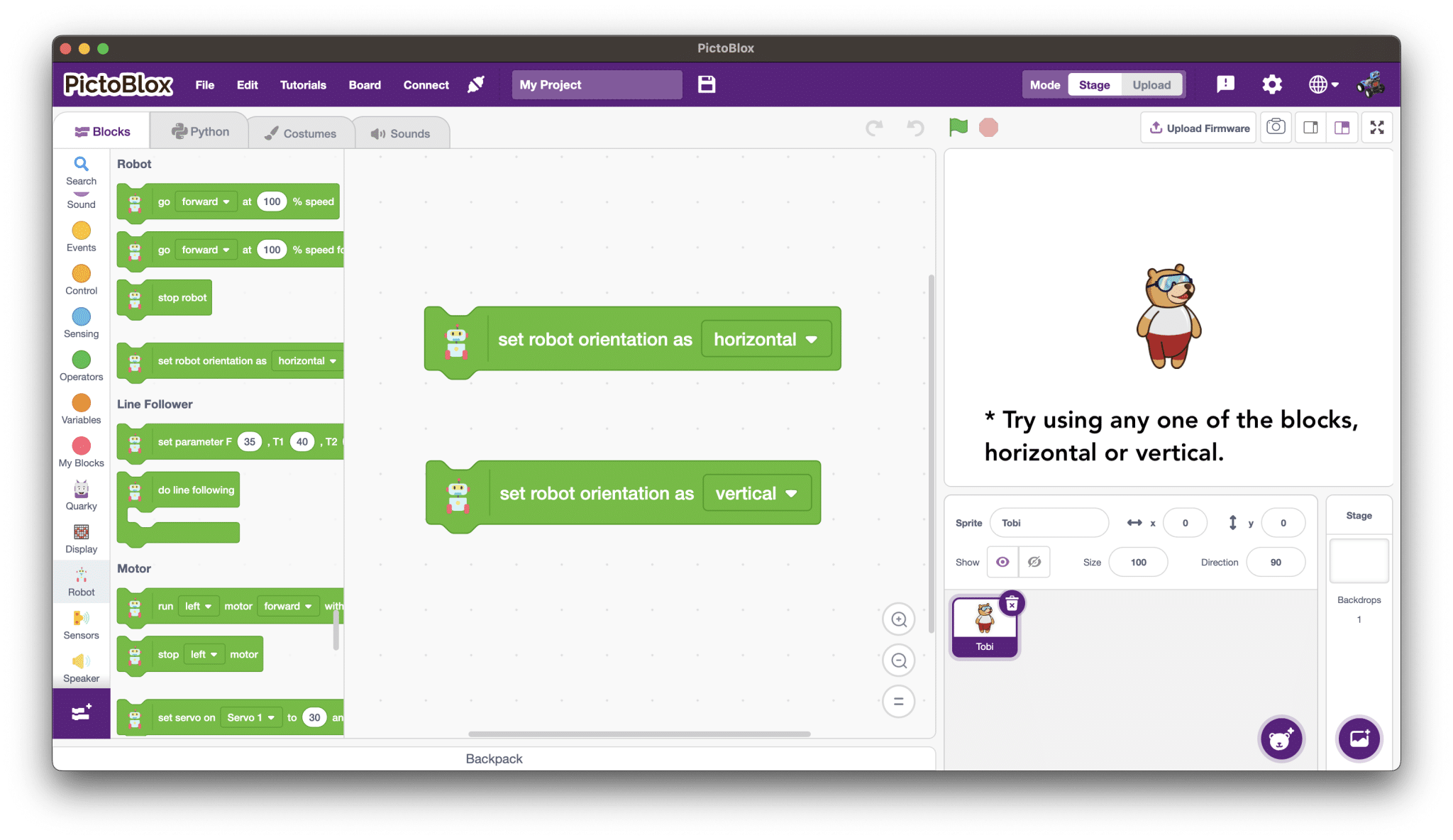
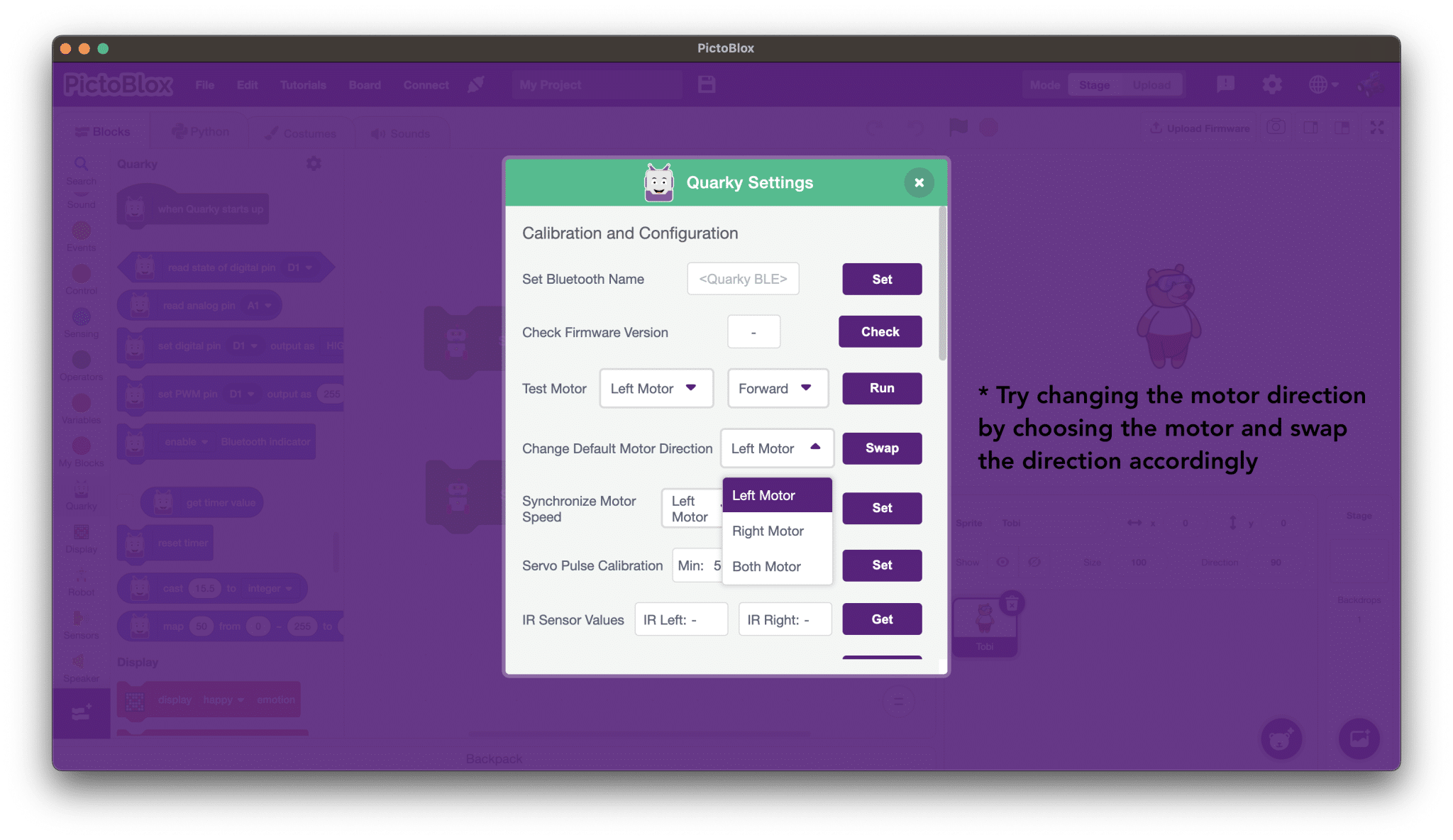
First, try changing the orientation to Horizontal or Vertical from the Robot palette. If that does not work, go to the Quarky settings and you will see the option to change the motor direction in Calibration and Configuration section, choose the motor and swap the direction accordingly.
Go to the Quarky settings and you will see the option to change the motor direction in Calibration and Configuration section, choose the motor and swap the direction accordingly.
What to do if one of Quarky’s motors is working fine but the other is not?
There can be the following cases:
- Wrong code: This issue might be caused by the wrong code. Please verify the code or test the motors using Quarky settings.
- Loose or damaged connectors: Please look on the bottom side of the Quarky to check if the connectors of motor wires are properly inserted in the Motor L and Motor R connectors onthe PCB. The connector on the PCB can be unis the motor is pulled
- Damaged Motor Driver: In rare cases, one of the motors can stop working due to partial damage to the motor driver IC. Please contact with the support.
How to fix the motor if the gearbox comes out?
Follow the steps:
Step 1: Disassemble the gearbox from the wheel if the gearbox is still inserted in the wheel. The wheel and the gearbox will be separated.
Step 2: The gearbox will have to bolts on it. Use equipment: Take one screwdriver + type.
Step 3: Fix the gearbox on a motor with those 2 pcs of bolts on the N20 motor with the help of the screwdriver.
How to solder the Quarky motor’s wire?
Follow the steps:
Step 1: Disassemble the motor from the bracket with the help of a screwdriver.
Step 2: Disassemble the motor wire from The Quarky board.
Step 3: Now clean the surface of the motor connection where the wire is to be solder. (Clean all glue on the motor surface)
Step 4: Use equipment: Soldering iron and soldering wire (ROHS).
Step 5: Fixed the motor’s wire with the help of the soldering iron and the soldering wire.
For any issues with Quarky motor’s Wheel, please read here.


