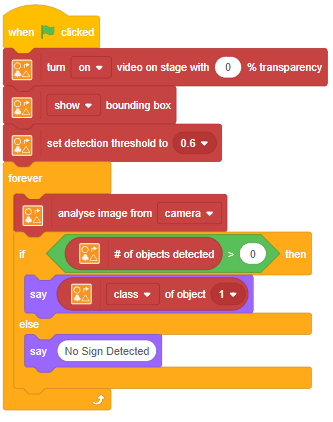








This block is used to set the threshold for the confidence (accuracy) of object detection, 0 being low confidence and 1 being high confidence. With the threshold value, you can set the level of confidence required for object detection.
Script
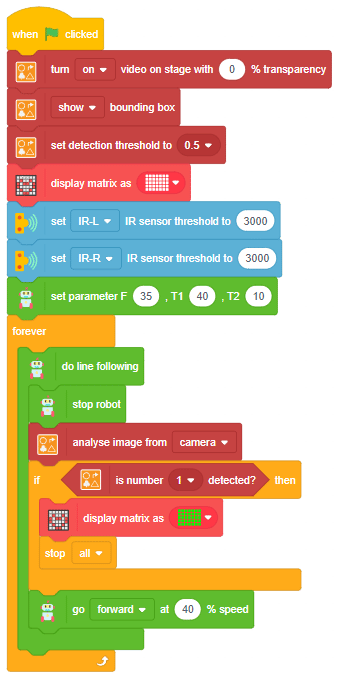

Alert: You need to calibrate the IR sensor to get the best line detection by the robot. Also, you need to calibrate the speeds to make the robot follow the line correctly.
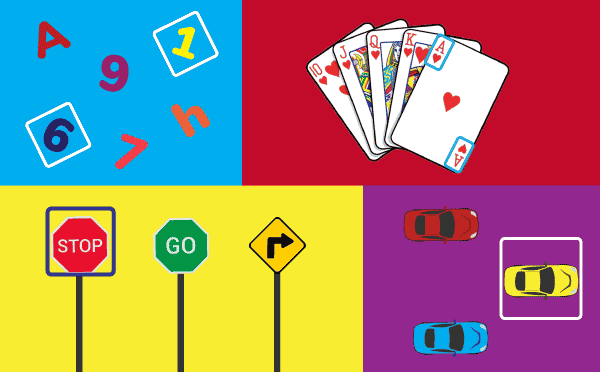
Output