


The block plays the specified audio on the Quarky speaker. The block has a callback, so other blocks will be executed after the audio is played.

The block plays the specified audio on the Quarky speaker. The block has a callback, so other blocks will be executed after the audio is played.
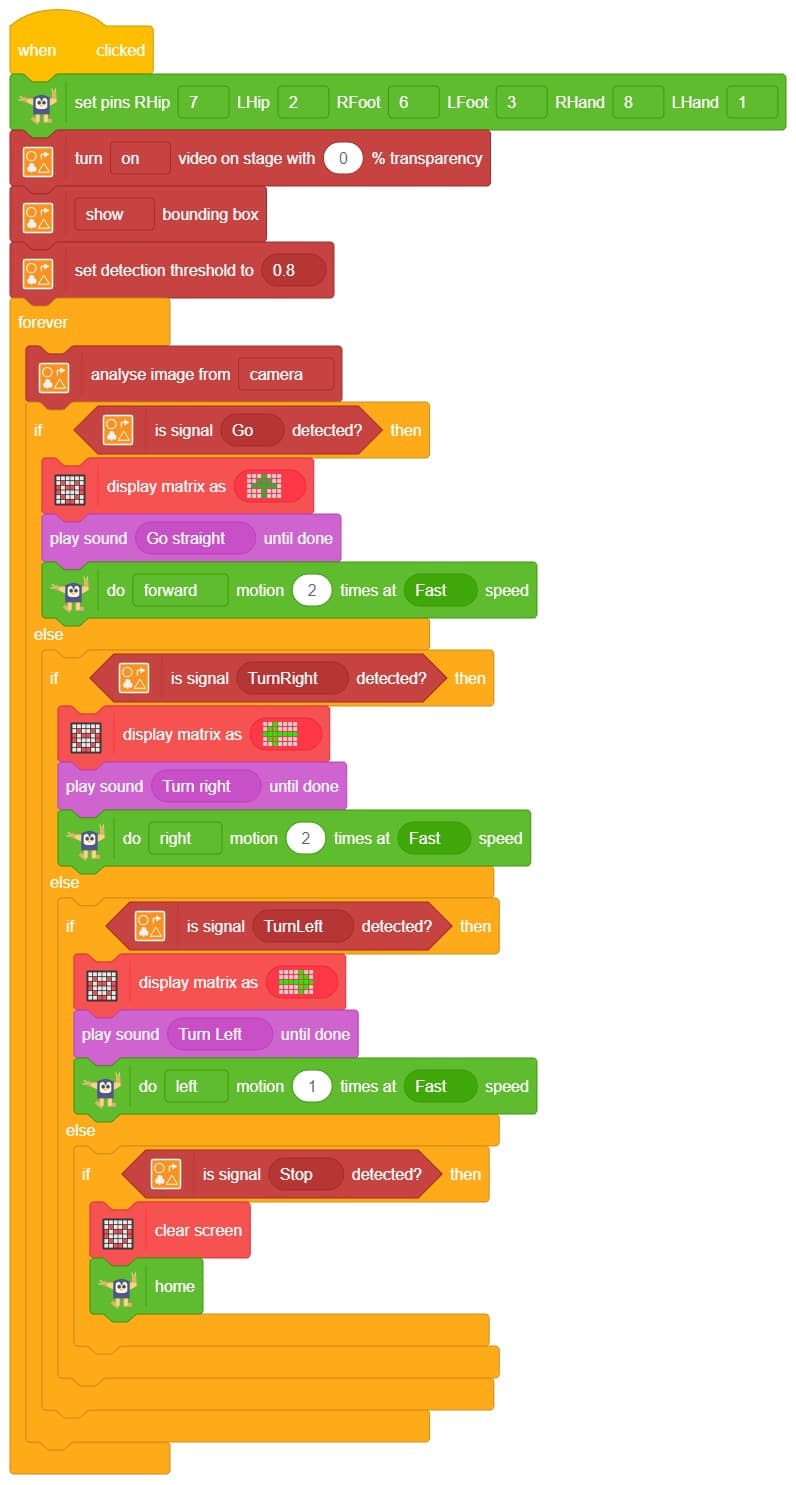
A sign detector Humanoid robot is a robot that can recognize and interpret certain signs or signals, such as hand gestures or verbal commands, given by a human. The robot uses sensors, cameras, and machine learning algorithms to detect and understand the sign, and then performs a corresponding action based on the signal detected.
These robots are often used in manufacturing, healthcare, and customer service industries to assist with tasks that require human-like interaction and decision-making.