
Connect left leg () right left () left foot () right foot () block is a stack block available in Humanoid Robot extension for evive and other Arduino boards. This block defines the PWM pins to which all the four servos of legs(2 servos of legs + 2 servos of feet) are connected.
Input Parameters
All the drop-down are to select the channels to which the servos are connected. By default, the values are set to 2, 3, 4, and 5.

Note: This block is available in both Stage and Upload mode.
Example
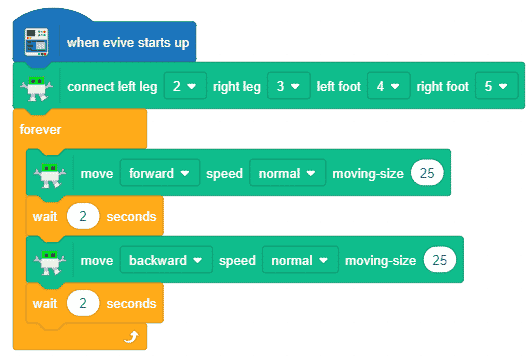
Here, in the given script, the humanoid robot will move forward and backward.
- Define PWM pins for the servos of legs and feet are connected.
- The humanoid robot will continuously move forward then wait and again move back to its initial position i.e. from the position where it started moving.
Note: Before working with the Humanoid Robot, we need to calibrate the hands such that they are straight and calibrate the legs in such a way that they are facing forward.




