Connections
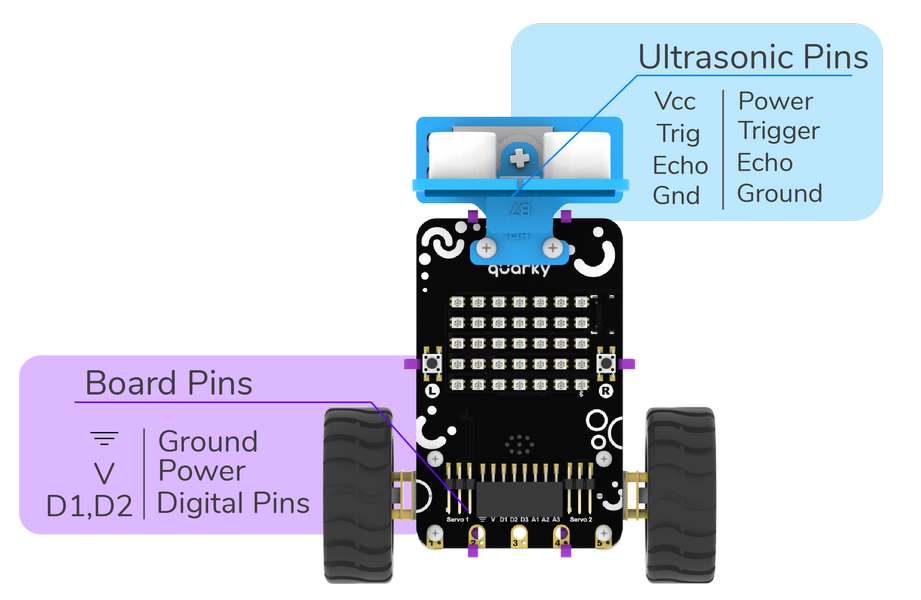
Now we will connect the Ultrasonic Sensor to the Robot. The sensor and the robot have the following pins:
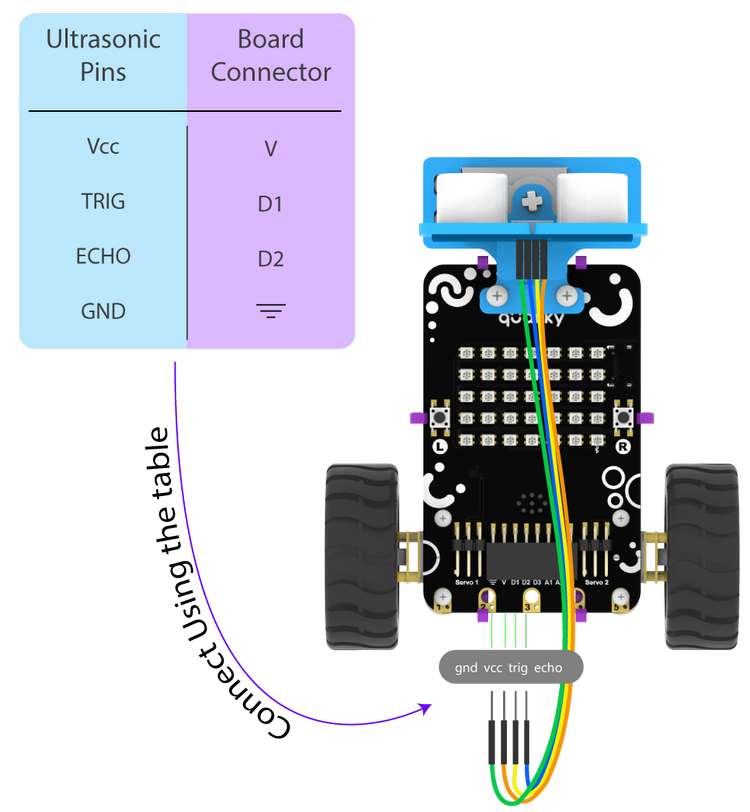
We will start with connecting the ultrasonic sensor with Quarky using the 4 set wire provided in the kit. But, first, make the connection in the following way:
- First, connect the VCC of the ultrasonic sensor with the V pin on the Quarky.
- Connect the GND of the ultrasonic sensor with the Ground pin on the Quarky.
- Connect Trig of the ultrasonic sensor with D1 pin on the Quarky.
- Finally, connect the Echo of the ultrasonic sensor with the D2 pin on the Quarky.

Code
sprite = Sprite('Tobi')
quarky = Quarky()
quarky.setultrasonicpins(1, 18, 19)
while True:
sprite.say(quarky.getdistance(1))
Output