


Steps :
1. Set IR threshold for stopping the robot at the crossing lines
2. Use a block to get IR value for reading IR value
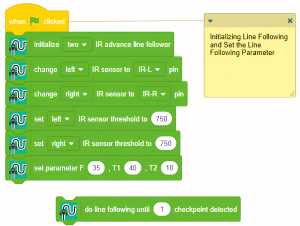
3. The below example uses a pid line following blocks
4. When you click doline following robot start line following and stop at the check-point(when both IRs are at the Black line)
Script
Output