Toggle Side Panel
Open Resourses
Quarky Series
Quarky
Quarky Mars Rover
Quarky Humanoid
Quarky Quadruped
Quarky IoT House
Quarky Mecanum
Quarky Robotic Arm
Quarky Intellio
Wizbot Neo
PictoBlox
Getting Started
Free Course
ML Environment
PictoBlox Extensions
Arduino with PictoBlox
evive Series
evive Board
Getting Started with evive
evive Technical Specifications
evive PictoBlox Tutorials
evive Arduino IDE Tutorials
evive IoT Kit
Bio Tech Addon Kit
Bio-Medical Kit
Dabble App
Getting Started with Dabble
Dabble App Modules
Courses
Projects
Projects by STEMpedia
Community Projects
Examples by STEMpedia
Gallery
Shop
Login
More options
Sign in
Sign up
Search for:
Open Resourses
Quarky Series
Quarky
Quarky Mars Rover
Quarky Humanoid
Quarky Quadruped
Quarky IoT House
Quarky Mecanum
Quarky Robotic Arm
Quarky Intellio
Wizbot Neo
PictoBlox
Getting Started
Free Course
ML Environment
PictoBlox Extensions
Arduino with PictoBlox
evive Series
evive Board
Getting Started with evive
evive Technical Specifications
evive PictoBlox Tutorials
evive Arduino IDE Tutorials
evive IoT Kit
Bio Tech Addon Kit
Bio-Medical Kit
Dabble App
Getting Started with Dabble
Dabble App Modules
Courses
Projects
Projects by STEMpedia
Community Projects
Examples by STEMpedia
Gallery
Shop
Login
Search for:
Close search
Table of Contents
Example
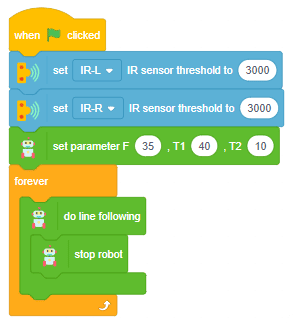
Line Follower Robot – Simplified
Example Description
The example demonstrates how to make a simplified line following a robot with Quarky.
Programming Mode:
Block Coding
Extensions/Library Used:
Robot (Quarky)
,
Sensors (Quarky)
Publish Date:
August 11, 2022
Download File
Script
Alert:
You need to calibrate the IR sensor to get the best line detection by the robot. Also, you need to calibrate the speeds to make the F, T1 and T2 speeds for the robot to follow the line correctly.
Output
PictoBlox Extensions
Scratch Based Default Extensions
Motion
Looks
Sound
Control
Sensing
Operators
My Blocks
Variables
Artificial Intelligence
Face Detection
Object Detection
Human Body Detection
Computer Vision
Text Recognition
Speech Recognition
ChatGPT
Natural Language Processing
Recognition Cards
Text to Speech
Translate
Open CV
Innovative Extensions
Graph Extension
Content Creation Extension
Animated Text Extension
QR Code Scanner
Weather Data
Physics Engine
IFTTT Webhooks
Internet of Things (IoT)
Data Logger
Music
Video Sensing
Pen
Machine Learning Environment
Image Classifier (ML)
Object Detection (ML)
Pose Classifier (ML)
Hand Pose Classifier (ML)
Audio Classifier (ML)
Number Classifier and Regression (ML)
Text Classifier (ML)
Quarky
Quarky Advance Sensors Extension
Quarky Connect
Display (Quarky)
Quarky (Main)
Robot (Quarky)
Sensors (Quarky)
Speaker (Quarky)
Quarky Ultimate Robots
Quarky Expansion Board
Mars Rover
Humanoid (Quarky)
Quadruped (Quarky)
IoT House (Quarky)
Quarky Mecanum
Quarky Robotic Arm
Dabble
Quarky Advance Line Following