Pick and place is arguably the most frequent robotics application nowadays and is unquestionably well-liked. They are extensively used in today’s manufacturing and industrial environments.

A Pick and Place robot, as the name implies, can quickly pick up an object from one position and drop it in another. They take care of the repetitive tasks that tend to be mundane and burdensome for humans. Inspecting, transporting, and packaging products are just a few of their jobs in manufacturing and other industries.
Assembly
We are starting with the Horizontal Robot.

- First, detach the Castor Wheel from the Quarky Robot by removing the Bolt.
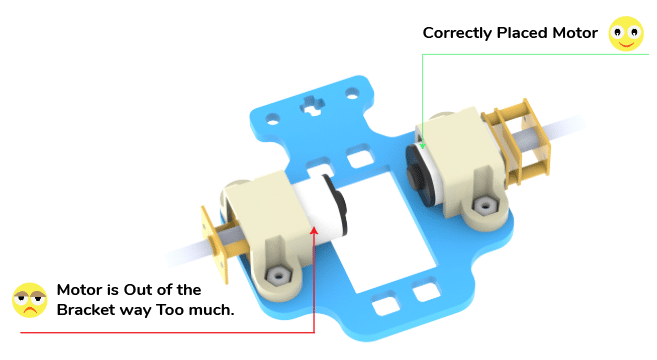
- Place the Motors on the top of the B1 Plate using the Motor Mount Bracket. Fasten it using M2 Bolt and M2 Nut that you get with Motors.
 Note: You have to make sure the Motor is appropriately mounted.
Note: You have to make sure the Motor is appropriately mounted.
 Note: Make sure the B1 is written on the opposite side of the Motor.
Note: Make sure the B1 is written on the opposite side of the Motor.
- Now attach the Wheels to the Motors.
- After that, attach the Wheel sub-assembly (with wheels) in front of the Robot. Fasten it using M2.5 Nuts and Bolts.

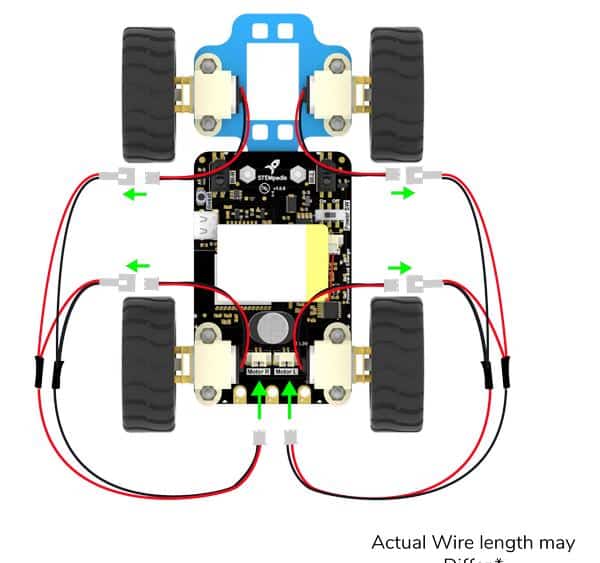
- The motor connection is similar to the Four Wheel Drive Robot. Connect the two left motors and then connect the wire to the Board. Do the same for the right motors.
- Fasten one Spacer on the B5 Plate with an M3 Bolt of 8mm Length as shown below.
- Fasten another Spacer on the B5 Plate with an M3 Bolt of 8mm Length as shown below.
- Fasten another Spacer on the B5 Plate with an M3 Bolt of 8mm Length as shown below. The spacer will be on the opposite side of the other spacers.
- Fasten another Spacer on the top of the other B5 Plate with an M3 Bolt of 8mm Length.
- Align both the B5 Plates on Spacers as shown below and Fasten them using two M3 Bolt of 8mm Length.
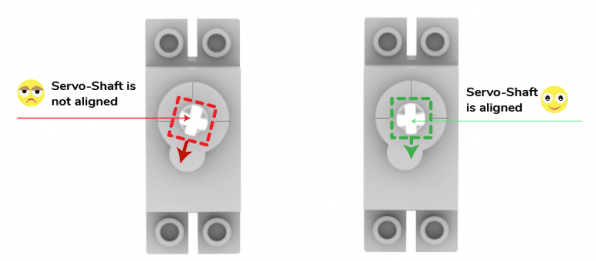
- Insert the Servo Motors in the B5 Plate and snap it tight. You have to make sure that the wire of the servo motor is coming from the inside. The Servo Motor shaft aligns with the ‘+’ mark on the B5 Plate.

- Snap the B5 Plates on the Quarky Robot as shown below.

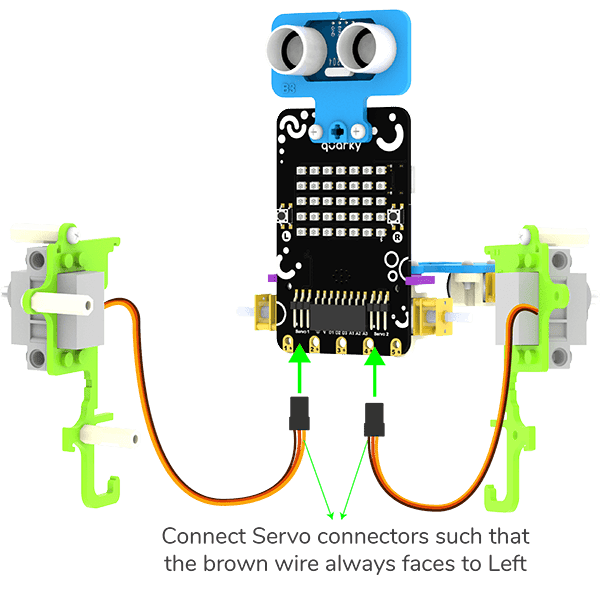
- Connect the Left Servo Motor to the Servo 1 and the Right Servo Motor to the Servo 2. Note: The position of ultrasonic head is only for illustration purpose here. The below image only shows how to connect servo motor pins, the positioning of ultrasonic head is optional.
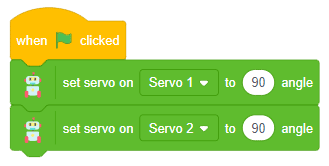
- Open PictoBlox and set the Servo Motor angle to 90 degrees. The servo head should get aligned properly.
- Lock the B5 Plate by snapping the B6 Link.
- For the next sub-assembly, Attach the 2 Spacers to the B12 Link with the M3 Bolt of 8mm Length.
- Now attach 2 more Spacers to the same B12 Link with the M3 Bolt of 8mm Length.
- Now attach 2 more Spacers to the other B12 Link with the M3 Bolt of 8mm Length on the opposite side.
- Align two B12 Links and fasten with the M3 Bolt of 8mm Length. We will call this subassembly – Hook Assembly.
- Align & attach the B10 Link to the Spacers of the Hook Assembly with the M3 Bolt of 12mm Length and on the Spacer of the B5 Plate with the M3 Bolt of 12mm Length.
- Snap the B11 Link on the Servo Motor Shaft. On the other side of the B11 Link attach it to Hook Assembly with the M3 Bolt of 12mm Length.
- Align & attach the other B10 Link to the Spacers of the Hook Assembly with the M3 Bolt of 12mm Length and on the Spacer of the B5 Plate with the M3 Bolt of 12mm Length.
- Snap the other B11 Link on the Servo Motor Shaft. On the other side of the B11 Link attach it to Hook Assembly with the M3 Bolt of 12mm Length.
The assembly is complete. 
The ultrasonic sensor assembly is optional (The sensor can be mounted on the B1 plate by placing it on the B2 -B7 assembly similar to the Obstacle Avoidance Robot).
It’s time to program your own Pick and Place Robot!
Programming Blocks for the Robot
We will use the Quarky Ultimate Robots extension from PictoBlox to control the robot. The following programming blocks can be used for the Pick and Place Robot in PictoBlox block coding mode:
Python Functions for the Robot
We will use the Quarky class to program the robot. The following Python Functions can be used for the Pick and Place Robot in PictoBlox Python coding mode:
Activity: Pick and Place Action – Block coding
Using the arrow keys, the robot should be able to move in four directions: forward, backward, left, and right. It should also be able to pick and place the object with the help of the up and down arrow sprites. Let’s look at how to make a script for it.
Setting up the Stage
- Add two Arrow sprites to the stage from the sprite library.
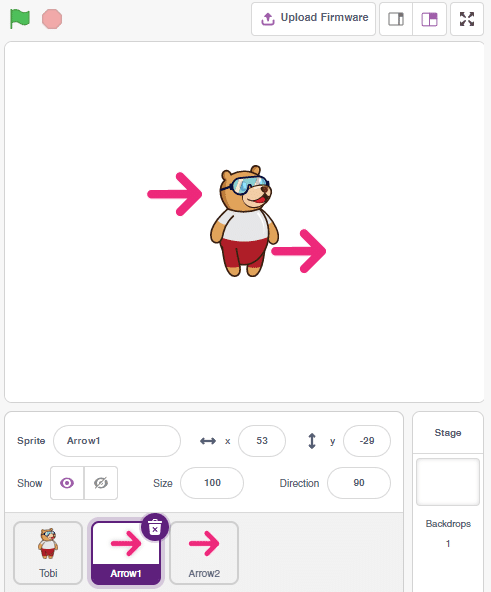
- Rename the Arrow sprites to Pick and Place.
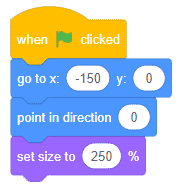
- Click on the Pick sprite and add the script to go to -150, 0 positions, point in 0degrees, and set the size to 250%.
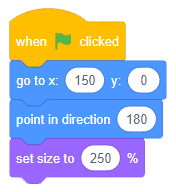
- Click on the Place sprite and add the script to go to 150, 0 positions, point in 180 degrees, and set the size to 250%.
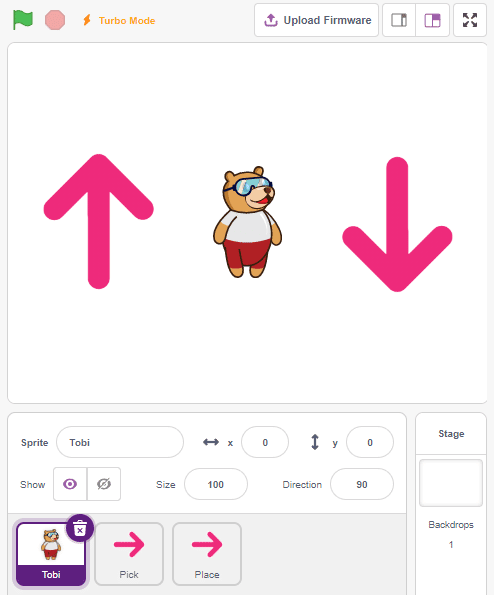
- Finally, click on the green flag to set up the stage.
Initializing Robot
- Add Quarky Ultimate Robots Extension.
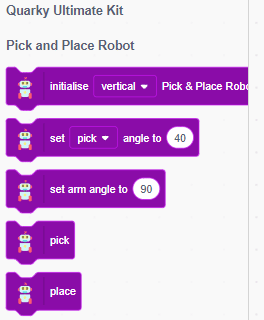
The extension adds the following blocks for Pick and Place Robot.
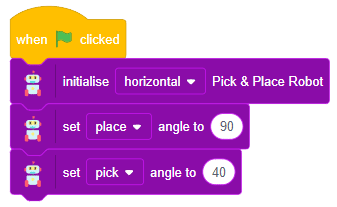
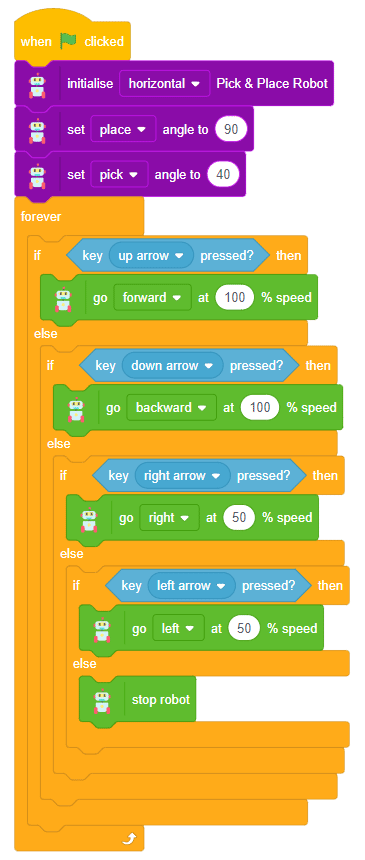
- Select Tobi sprite. Add when green flag clicked block.
- Add initialize () Pick and Place Robot block from the Quarky Ultimate Kit palette. Select the orientation as horizontal.
- Add set () angle to () block. Select the action as place and angle to 90.
- Add another set () angle to () block. Select the action as pick and angle to 40.
Pick Action
- Click on the Pick sprite and add when the sprite is clicked block from the Control palette. This will start the script when the Pick arrow is clicked.
- Add the pick block from the Quarky Ultimate Kit palette.

Test the action.
Place Action
- Click on the Place sprite and add when the sprite is clicked block from the Control palette. This will start the script when the Place arrow is clicked.
- Add the place block from the Quarky Ultimate Kit palette.

Test the action.
There is only one thing remaining, create the control of the robot to move it forward, backward, left, and right. This we have already done previously in the wirelessly controlled robot.
Click on the Tobi sprite and create the same script.
Play with the Robot
Now the code is complete. You can test the code and start playing with the robot.
Conclusion
In conclusion, we have successfully assembled and programmed the Quarky Pick and Place Robot. We gained practical experience in building and programming a functional pick-and-place robot, enhancing their understanding of robotics and artificial intelligence applications. This knowledge equips us with the skills to tackle more complex robotic challenges and fosters a deeper appreciation for the intricacies of autonomous systems.