


The purpose of servo motor calibration is to align the angle of your servo motor properly.
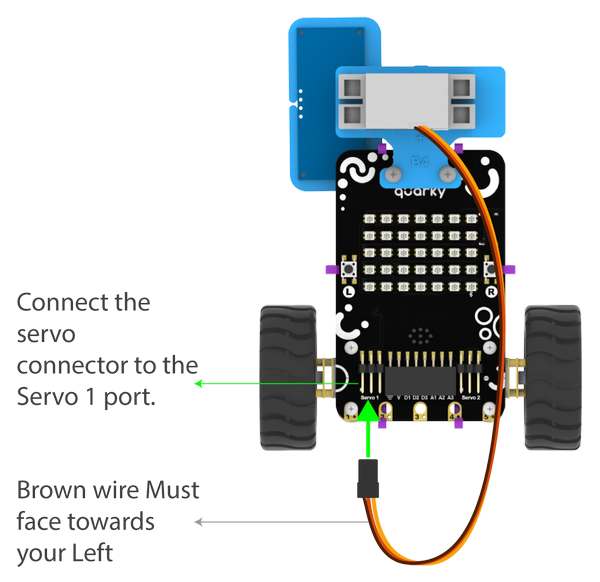
Connecting Servo to Quarky
The Servo motor will be connected to the Quarky Servo Connector. There are two servo ports on Quarky. Always make sure that brown wire is on your left side.
Code
sprite = Sprite('Tobi')
quarky=Quarky()
quarky.moveservo("Servo 1", 90)
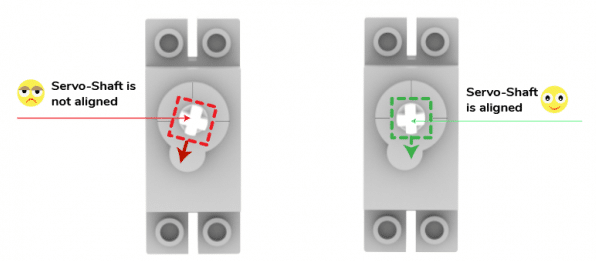
Put the Ultrasonic Assembly on the servo shaft.