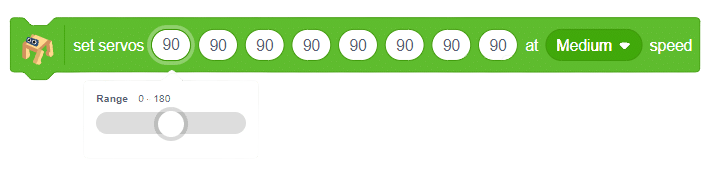
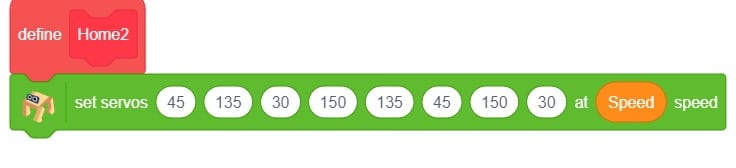
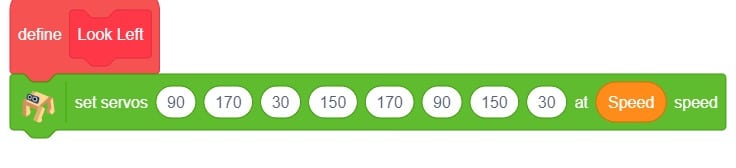
The block sets the servo motors of the quadruped to the specified angles at the specified speed.

Available Speed:
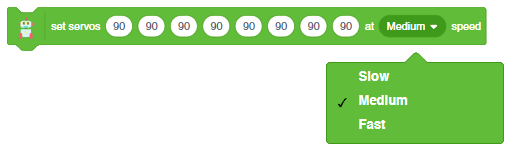
If you want to perform the change in the servo angle at a different speed, then you can use a variable to define the speed.


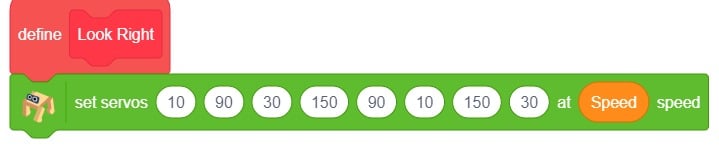
The block sets the servo motors of the quadruped to the specified angles at the specified speed.
Available Speed:
If you want to perform the change in the servo angle at a different speed, then you can use a variable to define the speed.
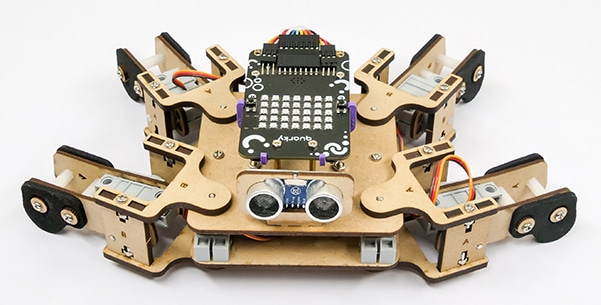
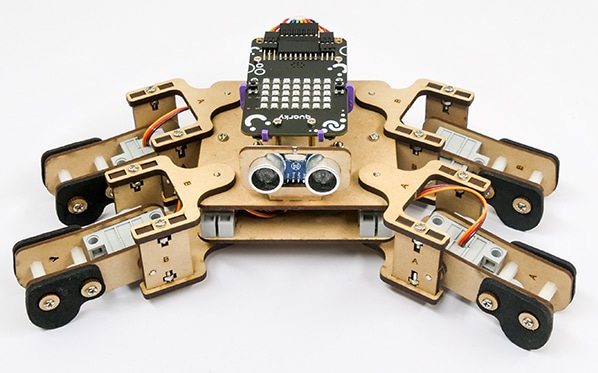
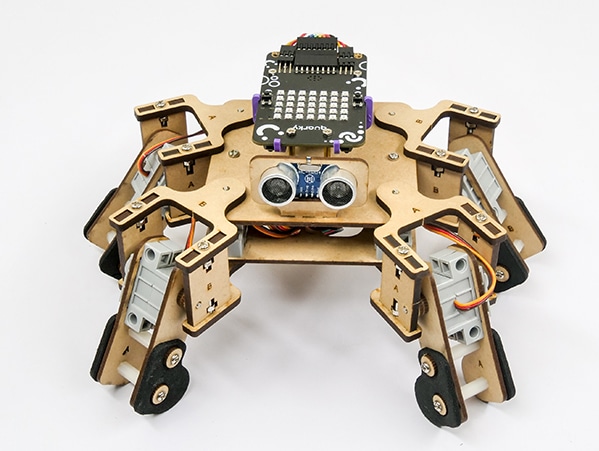
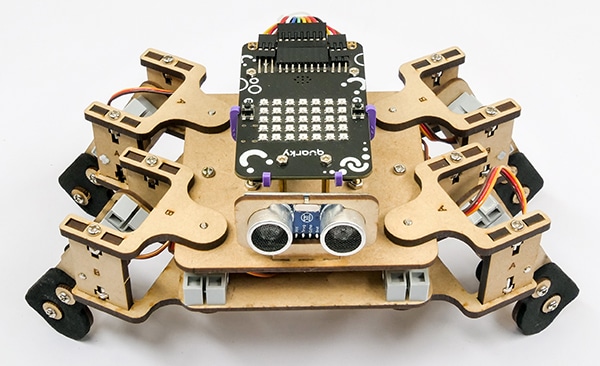
The project demonstrates how to make the crawling motion with Quadruped using individual servo control.
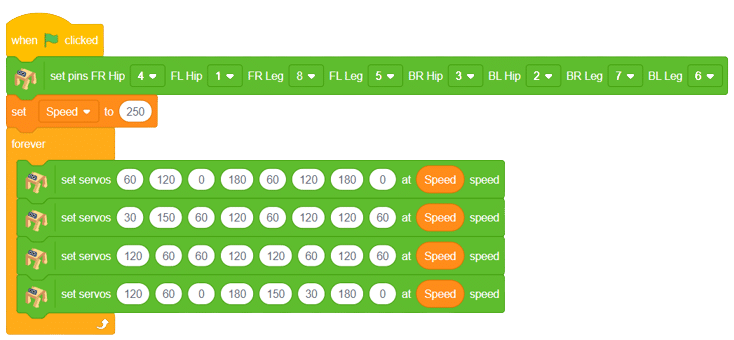
For this project, we are using the set servos () () () () () () () () at () speed block that sets the servo motors of the quadruped to the specified angles at the specified speed.
There are four positions of the robot we are going to make to create the crawling motion:




The project demonstrates how to make the Quadruped detect the hand in front of it and move according.
The logic is simple. If the distance measured from the ultrasonic sensor is less the robot will move toward the hand. Else the robot will lean backward.


If the distance measured from the ultrasonic sensor is less the robot will face upwards towards the hand. Else the robot will look downward.


This project of obstacle avoidance is for a robot that will move around and look for obstacles. It uses an ultrasonic sensor to measure the distance. If the distance is less than 20 cm, it will stop and look in both directions to see if it can move forward. If it can, it will turn left or right. If not, it will make a U-turn. The robot will also light up an LED display to show where it is going.
This code is making a robot move around and explore its surroundings. It has an ultrasonic sensor that can measure the distance between objects.
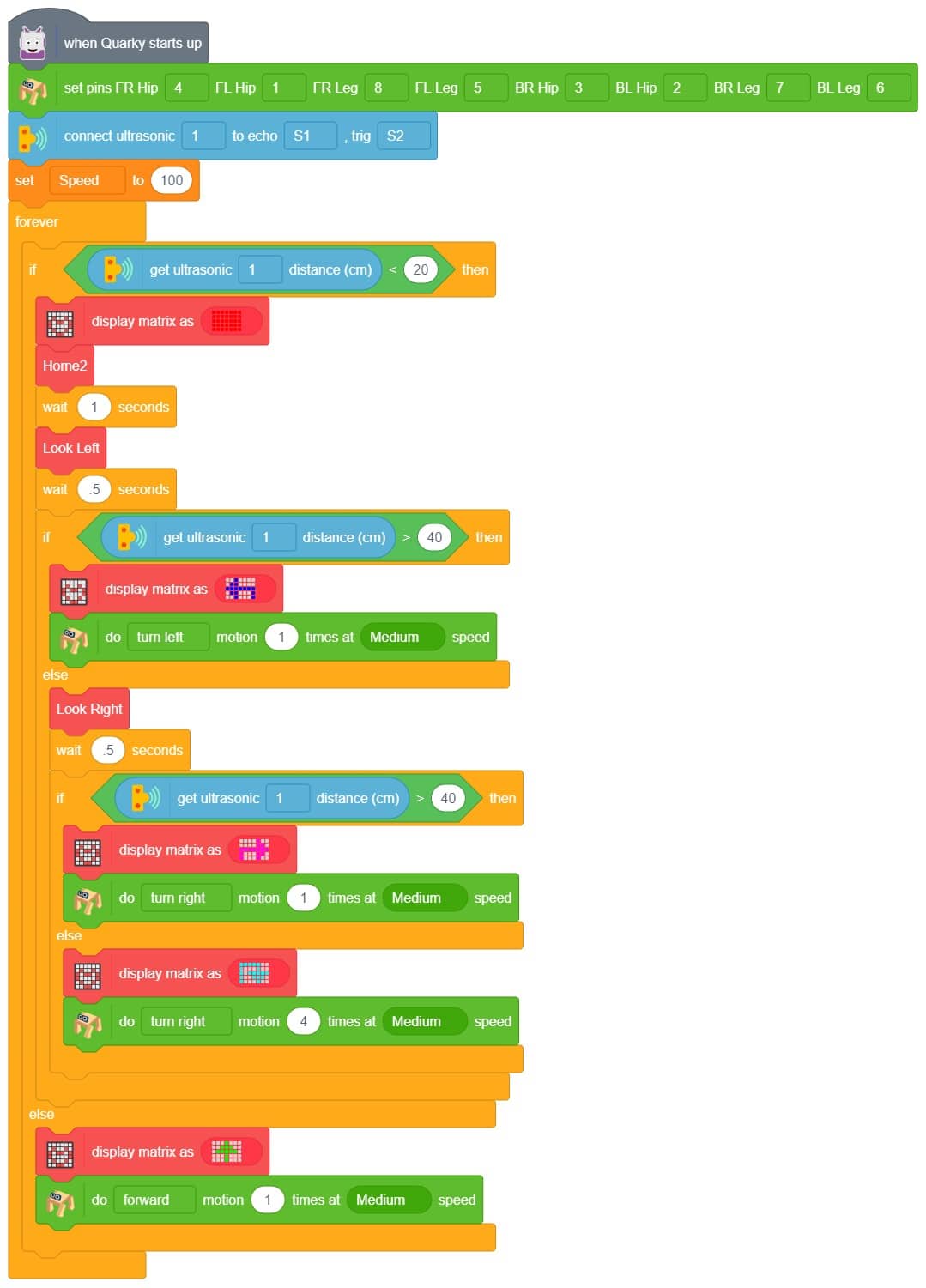
Upload the code to Quarky and test it.