Introduction
A quadruped robot is a robot that walks on four legs, just like animals such as dogs, cats, or horses. These robots are designed to move easily over rough or uneven ground where wheels may not work well.
They use special motors, sensors, and smart programs to help them balance, walk, run, and even jump! By studying quadruped robots, students can learn about robotics, animal movement, and how machines can be used for rescue missions, delivery, or exploring places where humans can’t go.

Quadrupeds are the superior choice for legged robots when it comes to mobility and stability of locomotion. Nature has proven the strength of four legs when it comes to passive stability, or the ability to remain standing without actively adjusting position. Quadrupeds are also more cost-effective and simpler to construct than robots with more legs, yet they can still provide stability.
Types of Quadruped
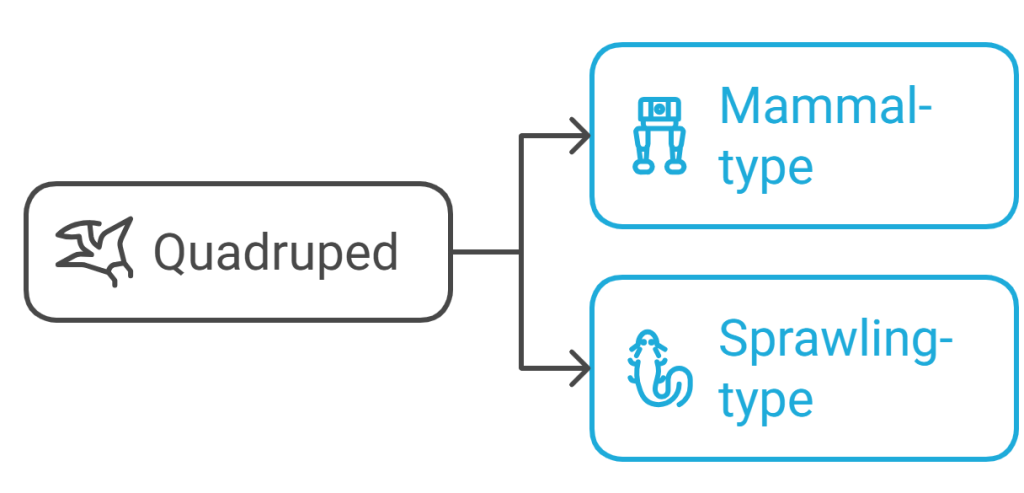
Quadrupeds can be divided into two groups based on their leg structure: Mammal-type and Sprawling-type.
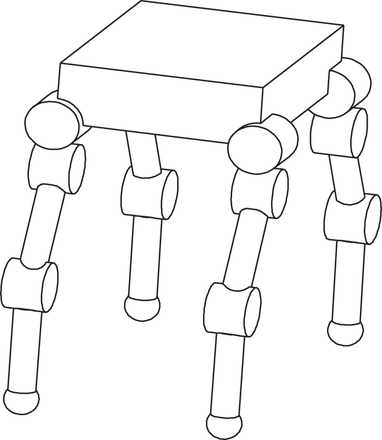
Mammal-type Quadruped
A mammal-type quadruped is a four-legged robot or animal with its legs positioned under its body, like dogs, cats, or horses. This design helps the body stay upright and allows the robot to walk or run quickly and efficiently.
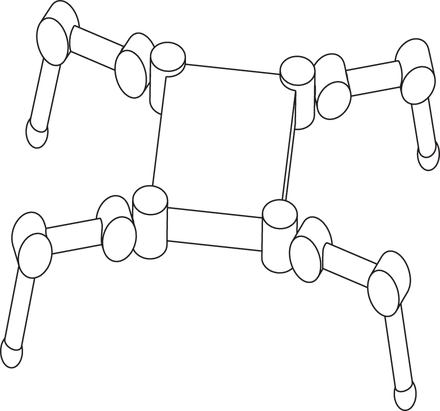
Sprawling-type Quadruped
A sprawling-type quadruped is a four-legged robot or animal with its legs sticking out to the sides of its body, like lizards or crocodiles. This posture keeps the body low to the ground, giving the robot more stability on uneven surfaces.
Introduction to Quarky Quadruped
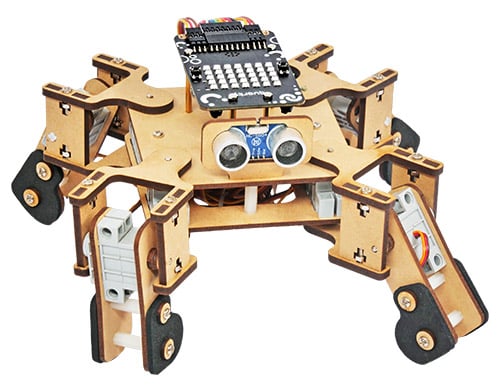
The Quarky Quadruped is a fun, four-legged robot built using the Quarky robot kit. It is designed to help students learn about robotics, coding, and how walking robots work.
With the Quarky Quadruped, you can build and program a small robot that walks on four legs, just like a dog or cat. They can control its movement, make it turn, and even try different walking styles. This hands-on project makes it easy for you to understand balance, sensors, and leg movement while having fun building your walking robot!

Our Quarky Quadruped is a four-legged robot that uses a sprawling gait, just like lizards and spiders. This means its legs stick out to the sides of its body, keeping it low and stable while it moves. The sprawling gait helps the robot balance easily and crawl smoothly over flat surfaces. By building and programming the Quarky Quadruped, students can learn how sprawling-type quadrupeds move and explore how different gaits affect a robot’s walking style.
However, they are not able to replicate the looks and behaviour of living pets such as dogs and cats. Despite this, sprawling-type quadruped robots are more popular and easier to build than mammal-type quadruped robots.
Parts of the Quaky Quadruped
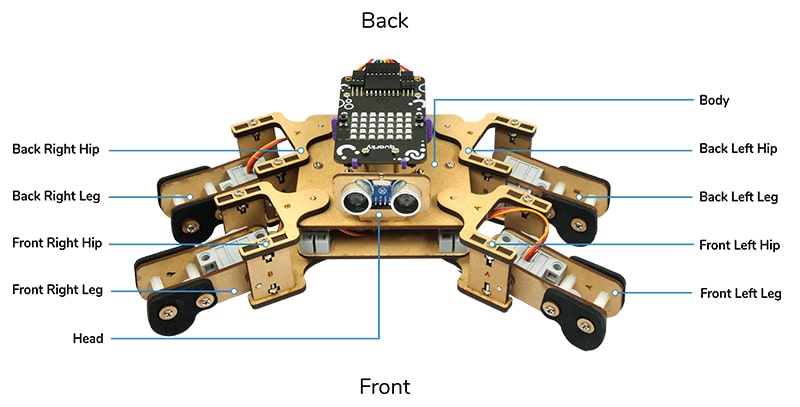
Importance of the Servo Motors and Joints
We use 8 servo motors in total for our quadruped robot. 4 servo motors are located in the main body, and the other 4 servo motors are located in each of the leg assemblies (shank). The servo motors in the hip assemblies connect the hip assemblies to the leg assemblies. These 4 leg assemblies are then connected to the main body of the robot with the help of the 4 hip servo motors.
The servo motors in the quadruped‘s main body (hip) rotate to change the alignment of the leg. Then the servo motors in the leg rotate to change the orientation of the shank. The two joints to the hip joint and the leg joint demonstrate that each of the quadruped’s legs has two degrees of freedom.
The Quadruped’s different movements are created by the programmed motion of the 8 servo motors.
Stability and Gaits
The quadruped robot has four legs for passive stability in a standing position. This is because the robot’s center of gravity (COG) lies within the quadrilateral formed by its four leg positions. To keep the robot balanced while walking, all eight servo motors must be controlled individually. This will ensure that the robot’s stability is maintained even when it is in motion, with not all four legs touching the ground.
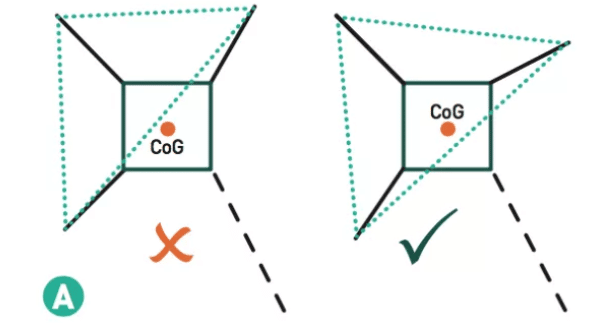
The robot lifts one leg at a time and keeps the other three feet on the ground. This ensures that its center of gravity (COG) remains inside the triangle formed by the three feet. If the COG goes outside the triangle for too long, the robot will fall over. This gait is the simplest walking gait to use.