This project demonstrates how to use Machine Learning Environment to make a machine–learning model that identifies the hand gestures and makes the Mecanum move accordingly.
We are going to use the Hand Classifier of the Machine Learning Environment. The model works by analyzing your hand position with the help of 21 data points. We will add in total 8 different classes to operate the different motions of the Mecanum Robot with the help of the ML Environment of the Pictoblox Software.
Hand Gesture Classifier Workflow
Follow the steps below:
- Open PictoBlox and create a new file.

- Select the coding environment as appropriate Coding Environment.
- Select the “Open ML Environment” option under the “Files” tab to access the ML Environment.
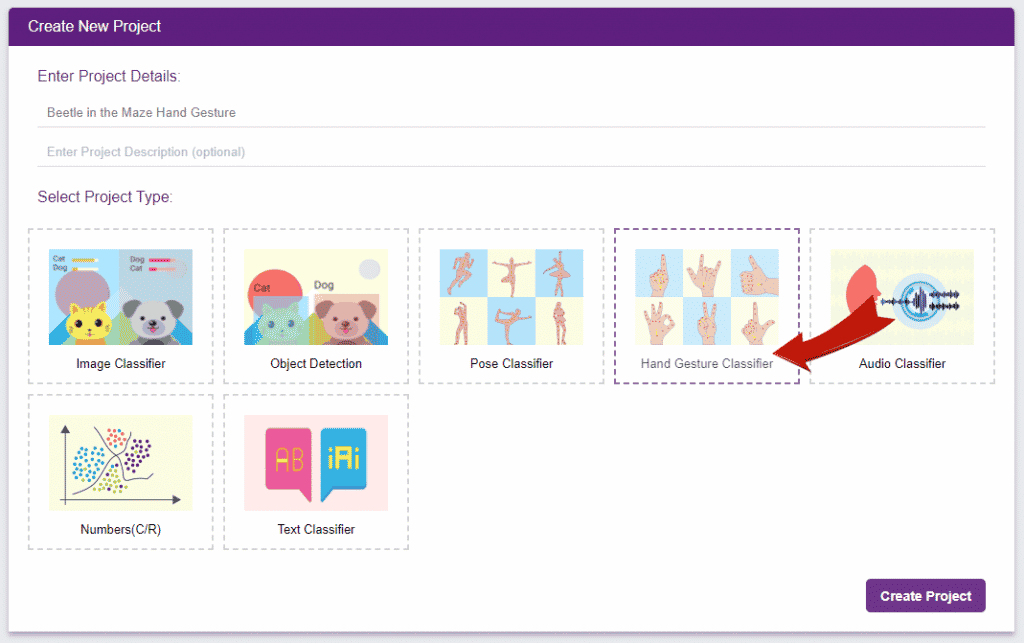
- Click on “Create New Project“.
- A window will open. Type in a project name of your choice and select the “Hand Gesture Classifier” extension. Click the “Create Project” button to open the Hand Pose Classifier window.
- You shall see the Classifier workflow with two classes already made for you. Your environment is all set. Now it’s time to upload the data.
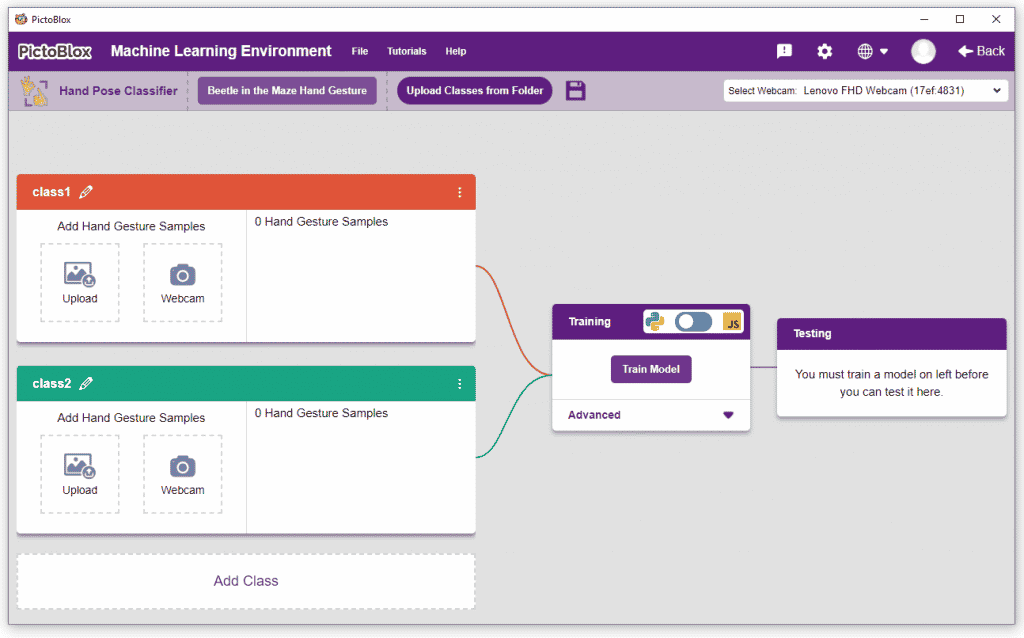
Class in Hand Gesture Classifier
There are 2 things that you have to provide in a class:
- Class Name: It’s the name to which the class will be referred as.
- Hand Pose Data: This data can either be taken from the webcam or by uploading from local storage.


Adding Data to Class
You can perform the following operations to manipulate the data into a class.
- Naming the Class: You can rename the class by clicking on the edit button.
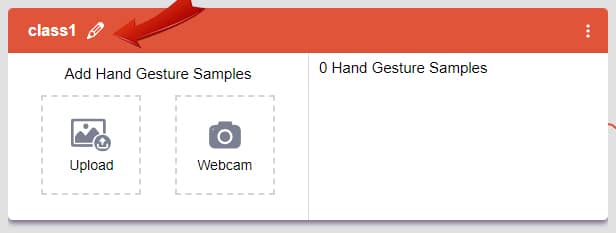
- Adding Data to the Class: You can add the data using the Webcam or by Uploading the files from the local folder.
- Webcam:
- Webcam:
Training the Model
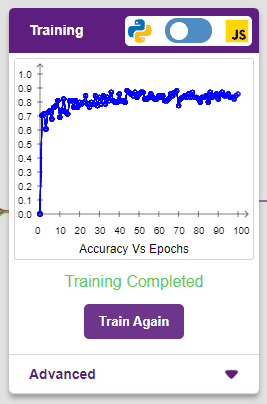
After data is added, it’s fit to be used in model training. In order to do this, we have to train the model. By training the model, we extract meaningful information from the hand pose, and that in turn updates the weights. Once these weights are saved, we can use our model to make predictions on data previously unseen.
The accuracy of the model should increase over time. The x-axis of the graph shows the epochs, and the y-axis represents the accuracy at the corresponding epoch. Remember, the higher the reading in the accuracy graph, the better the model. The range of the accuracy is 0 to 1.
Testing the Model
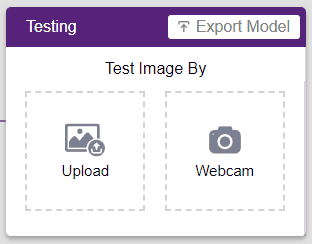
To test the model, simply enter the input values in the “Testing” panel and click on the “Predict” button.
The model will return the probability of the input belonging to the classes.
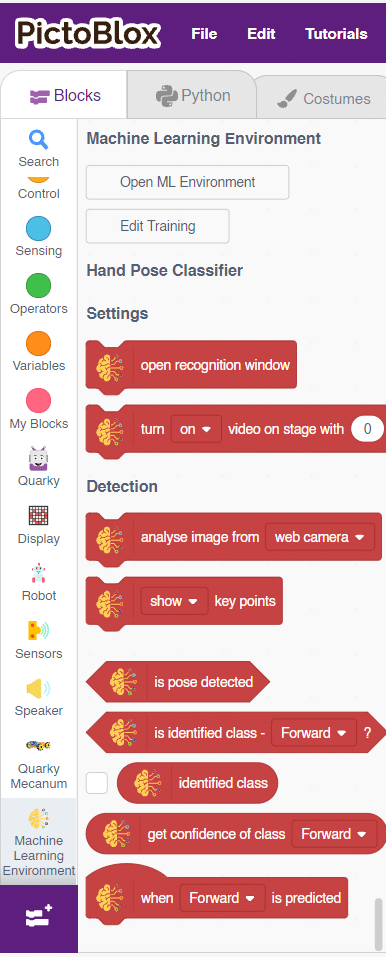
Export in Block Coding
Click on the “Export Model” button on the top right of the Testing box, and PictoBlox will load your model into the Block Coding Environment if you have opened the ML Environment in the Block Coding.
Logic
The mecanum will move according to the following logic:
- When the forward gesture is detected – Mecanum will move forward.
- When the backward gesture is detected – Mecanum will move backwards.
- When the Lateral Left gesture is detected – Mecanum will move towards the left direction laterally with the help of its omnidirectional wheels.
- When the Lateral Right gesture is detected – Mecanum will move towards the right direction laterally with the help of its omnidirectional wheels.
- When the Stop gesture is detected – Mecanum will stop moving.
- When the Normal Left gesture is detected – Mecanum will rotate in the left direction.
- When the Normal Right gesture is detected – Mecanum will rotate in the right direction.
- When the Circular Motion gesture is detected – Mecanum will move in a lateral arc.
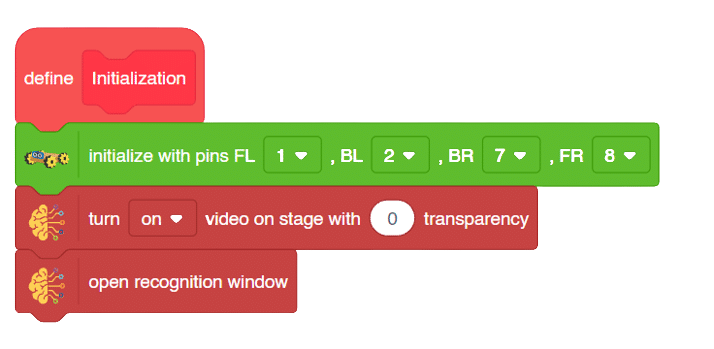
Code
Initialization
Main Code

Output
Forward-Backward Motions:
Lateral Right-Left Motions:

Circular Right-Left Motions:
Lateral Arc Motion: