The Quarky Mecanum Robot Drive Motors are initialized by the function, which assigns each motor to a specific port. This allows the robot to be programmed to move the motors in the desired direction.
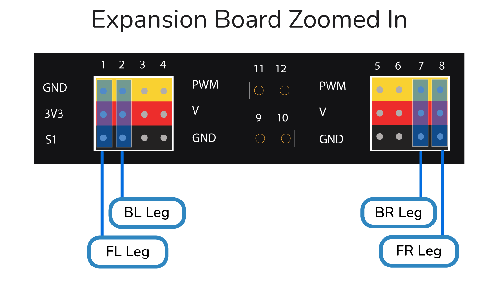
By default, the following pins are assigned:
- Front Left – Servo Port 1
- Back Left – Servo Port 2
- Back Right – Servo Port 7
- Front Right – Servo Port 8