
Quarky Mecanum Wheel Robot - Documentation
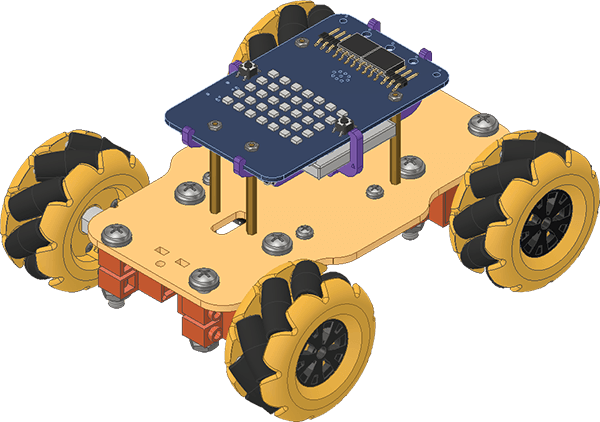
The Quarky Mecanum Wheel Robot is a type of robot that uses a special type of wheel to move. The wheel is made of four rollers mounted at 45-degree angles to the wheel‘s hub. Each roller has its own motor and can spin in either direction. This allows the wheel to move in any direction, making it an ideal choice for navigating around obstacles and tight spaces. The mecanum wheel robot can also turn on the spot, allowing it to make sharp turns without having to reverse direction. With 10+ different activities, this kit will guide you through the basics of Mecanum Wheel robotics.
Getting Started with Quarky Mecanum
Refer to the tutorials to learn about the Quaky Mecanum Wheel Robot, and how to assemble and program it in block coding or Python coding.

Learn how to assemble a Basic Quarky Mecanum Wheel Robot with Gripper with this step-by-step guide. We will be calibrating the servo motor, assembling the robot, and attaching the ultrasonic sensor and servo motor for you to explore robotics projects.
Learn how to assemble a Basic Quarky Mecanum Wheel Robot with Gripper with this step-by-step guide. We will be calibrating the servo motor, assembling the robot, and attaching the ultrasonic sensor and servo motor for you to explore robotics projects.

In this lesson, we will learn how to assemble the Pick and Place Quarky Mecanum Wheel Robot. We will go through the steps to connect the servo motors, ultrasonic sensor, and Quarky Expansion Board to the robot.
In this lesson, we will learn how to assemble the Pick and Place Quarky Mecanum Wheel Robot. We will go through the steps to connect the servo motors, ultrasonic sensor, and Quarky Expansion Board to the robot.

Learn how to program your Quarky Mecanum Wheel Robot with PictoBlox. With the help of PictoBlox, you can control the robot to move, grip, and perform pick & place actions.
Learn how to program your Quarky Mecanum Wheel Robot with PictoBlox. With the help of PictoBlox, you can control the robot to move, grip, and perform pick & place actions.
In this lesson, learn how to program the Quarky Mecanum robot with PictoBlox and Python in both Stage and Upload modes. Understand the functions provided in the Quarky Mecanum library, and see how to control the robot’s motors, pick-and-place robot, and gripper robot.
In this lesson, learn how to program the Quarky Mecanum robot with PictoBlox and Python in both Stage and Upload modes. Understand the functions provided in the Quarky Mecanum library, and see how to control the robot’s motors, pick-and-place robot, and gripper robot.
Quarky Mecanum Wheel Robot Project - Block Coding
Refer to the tutorials to learn how to use PictoBlox Block Coding Environment to code Quarky Mecanum Wheel Robot for different applications.
Learn how to control the Mecanum using PictoBlox with keyboard inputs. Make the Mecanum move forward, backward, turn left, and turn right along with unique lateral motions!
Learn to move your Quarky Mecanum Wheel Robot in a square and make an axe figure with PictoBlox. Use the arrow keys to activate the custom movements and watch your robot move in the desired direction!
Learn how to code logic for video input detection with this example block code. You will be able to direct your own Mecanum easily by just showing signs through the camera input.
Learn how to code logic for speech recognized control of Mecanum with this example block code. You will be able to direct your own Mecanum easily by just speaking commands.
This project demonstrates how to use Machine Learning Environment to make a machine–learning model that identifies the hand gestures and makes the Mecanum robot move accordingly.
In this activity, learn how to create a new Machine Learning model that will be able to identify and detect different types of hand poses and that can help us to control the Mecanum Gripper Robot.
Learn to control Mecanum Gripper Robot using Dabble App on your device with customized functions for different motions and activities.
In this activity, learn how to create a new Machine Learning model that will be able to identify and detect different types of hand poses and that can help us to control the Mecanum Pick and Place Robot.
Learn to control Mecanum Pick and Place Robot using Dabble App on your device with customized functions for different motions and activities.
All articles loaded
No more articles to load
Quarky Mecanum Wheel Robot Project - Python Coding
Refer to the tutorials to learn how to use PictoBlox Python Coding Environment to code Quarky Mecanum Wheel Robot for different applications.
Learn how to control the Mecanum using PictoBlox with keyboard inputs using Python. Make the Mecanum move forward, backward, turn left, and turn right along with unique lateral motions!
Learn to move your Quarky Mecanum Wheel Robot in a square and make an axe figure with PictoBlox’s Python Interface. Use the arrow keys to activate the custom movements!
In this activity, learn how to create a new Machine Learning model that will be able to identify and detect different types of hand poses and that can help us to control the Mecanum Gripper Robot.
Learn to control Mecanum using Dabble App on your device with customized functions for specialized motions using the Python Interface of the Pictoblox Software.
Learn how to use the Hand Gesture Classifier of the Machine Learning Environment to make a machine-learning model that identifies hand gestures and makes the Mecanum move accordingly.
In this activity, learn how to create a new Machine Learning model that will be able to identify and detect different types of hand poses and that can help us to control the Mecanum Pick and Place Robot.
Learn to control Mecanum Pick and Place Robot using Dabble App on your device with customized functions for specialized motions using the Python Interface of the Pictoblox Software.
Learn how to code logic for video input detection with this example code. You will be able to direct your own Mecanum easily by just showing signs through the camera input.
Learn how to code logic for speech recognized control of Mecanum with this example block code. You will be able to direct your own Mecanum easily by just speaking commands.
All articles loaded
No more articles to load
PictoBlox Extension Documentation
Refer to the documentation of PictoBlox Extension to understand how to use the blocks and functions for the Quarky Mecanum Wheel Robot.
