Introduction
No matter how hard evil tries, it can never prevail over good. This is what Dussehra, a major Indian festival teaches us. To keep the spirit of the festival alive, here’s how you can celebrate it the DIY way – make a DIY archery robot that wards off all kinds of evil letting only the truth triumph!
So, let’s give evil a taste of the power of DIY!
Assembly Overview

We are going to divide the making into two parts:
1) Making of the base
2) Making of the bow and arrow mechanism
Making of the base
The base of this is the smartphone-controlled robot.
You can find the assembly of the same here.
Now, the blix’s assembly cannot be mounted directly on top of evive, we need a plain base.
Now, we will attach one more chassis on the top of evive, using 60(30+30)mm standoffs.
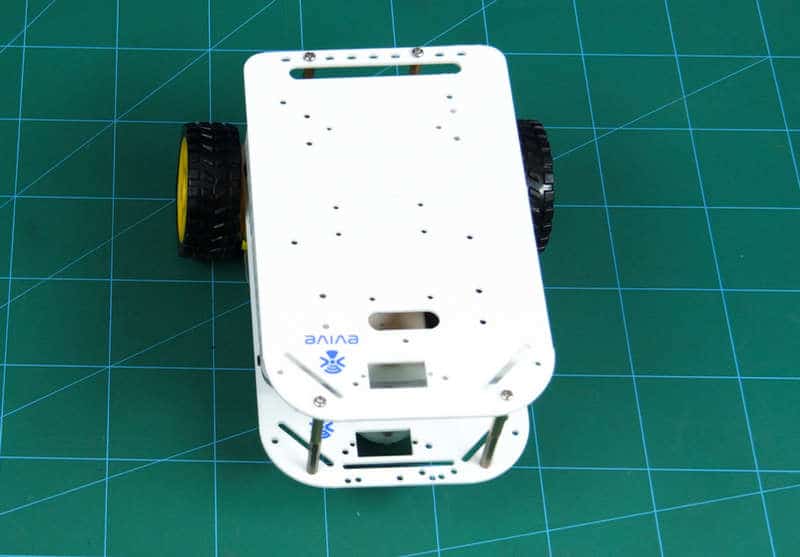
Thus, your base is ready.
Making the parts of the bow and arrow mechanism
Time to add a bow and arrow mechanism:
We did break it into 3 parts:
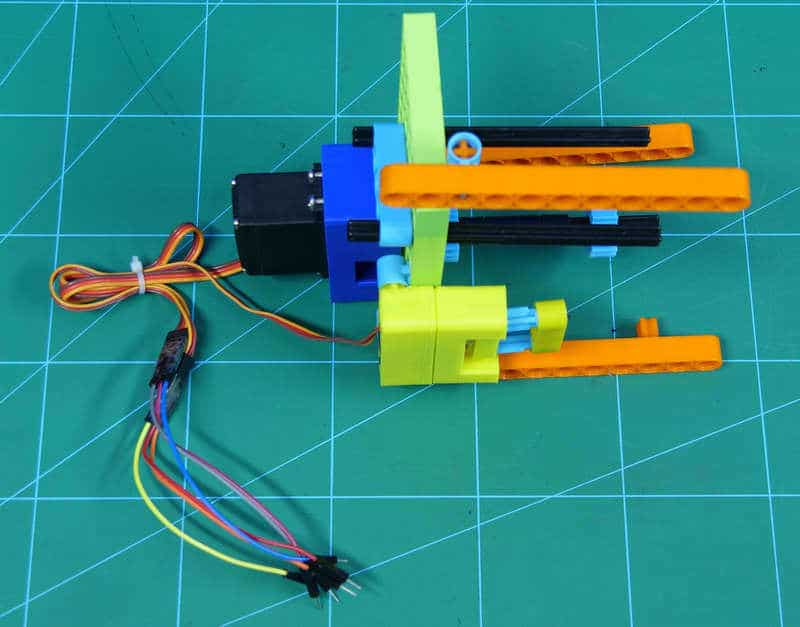
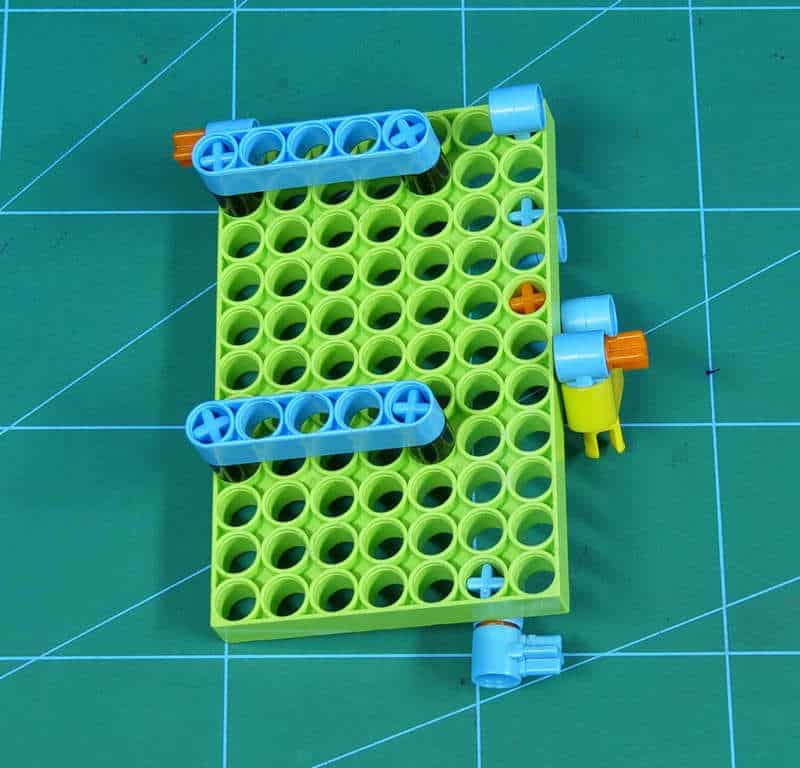
- Assemble the Lifting unit of Archery robot.
- Take a green Blix plate, slide 2 shafts into 2 holes of the plate.
- Fix a heavy duty servo to the bottom shaft on one side.
- Mount a hobby servo at the back the robot using the connectors.
- Fix a small gear as shown below.
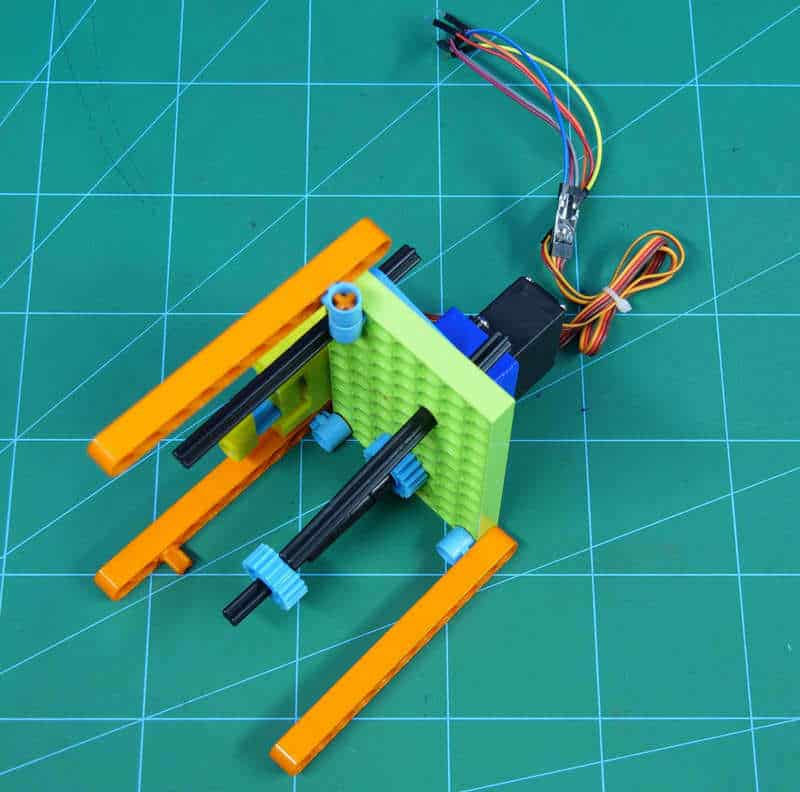
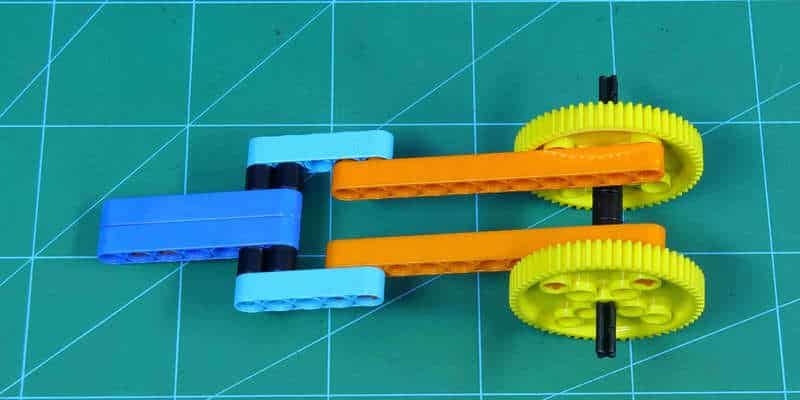
- The Second part is the platform for the bow.
- Connect 2 11-hole links, 2 5-hole links and 2 7-hole links with help of parallel connectors.
- Fix a set of a big gear to the shafts as shown below.
- Finally, to stabilize the whole mechanism, the third part is added. We even have the place in here, to keep the arrows.
Completing the assembly
Fix the first part to the top plate of the mobile robot with the help of cable ties/glue gun.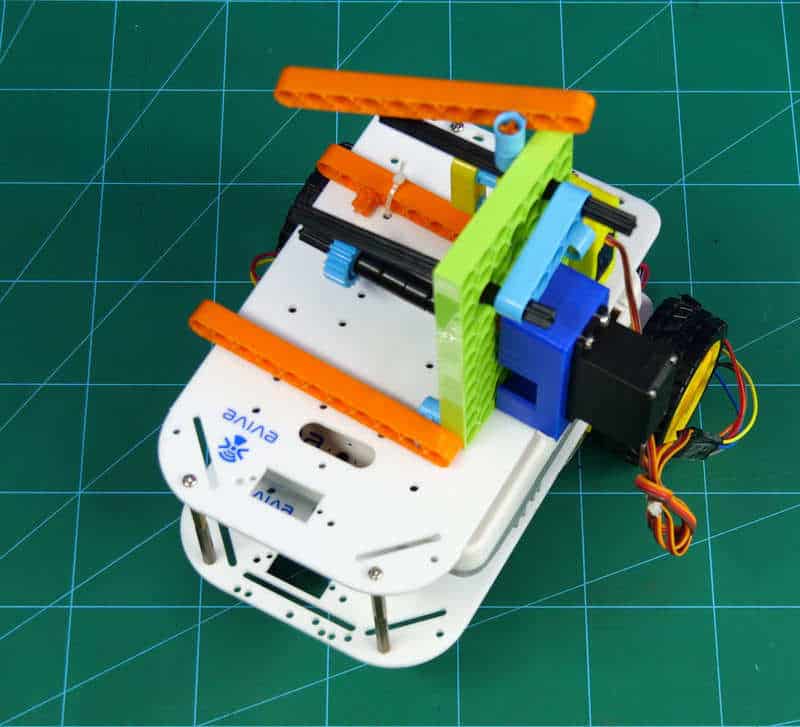
Shift the shafts in such a way that both the gears begin to mesh.
Fix the one side of the platform to the big gear with the help of parallel connectors.
Close the gears using the 3rd side.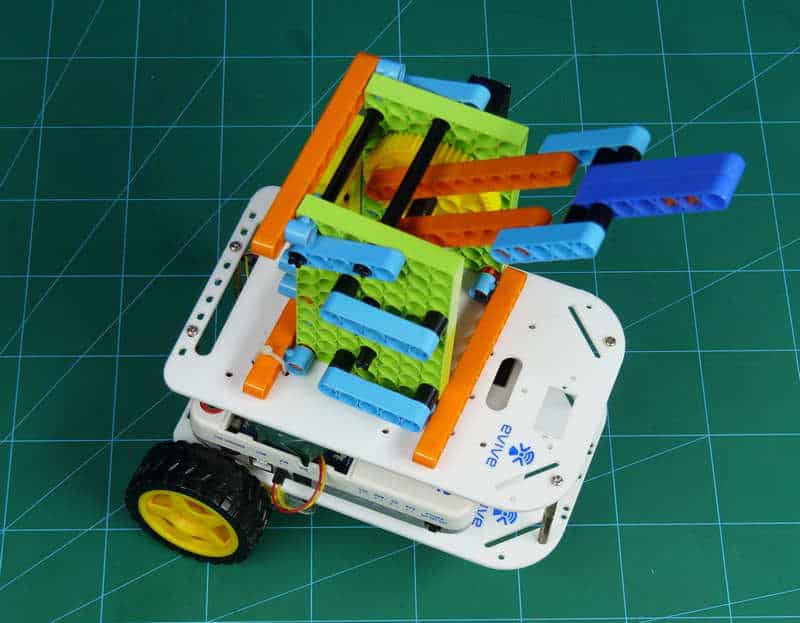

Stick the 3d printed bow on to the platform with the help of double sided tape and also put the rubber band on the bow.
Tie the string to the bottom lever of the bow and pass it through the top support to the trigger servo.
Logic
The metal servo is used to move the bow assembly in the vertical direction and the small servo acts as the trigger servo. With the help of trigger servo, the arrow realizes from the bow.
As it is Bluetooth controlled, the Gamepad module in Dabble, a project-making mobile application developed by STEMpedia, is used. You can install it on your phone from Google Play.
To pair Dabble with the Bluetooth Module, follow the steps below:
-
Install the app and open it.

-
Then, pair it with the HC-05 Bluetooth module.

-
Open Gamepad. You can now control your robot using the keys of the GamePad.

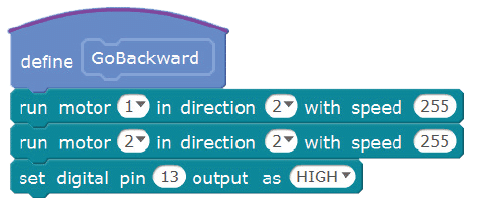
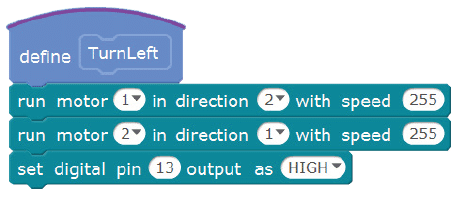
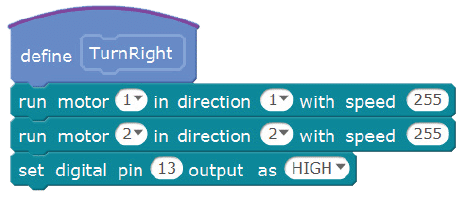
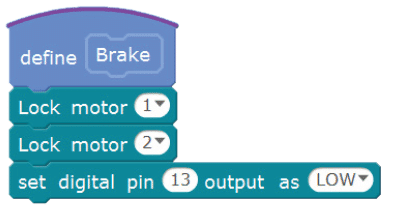
- The four direction buttons are used to control the movement of the robot.
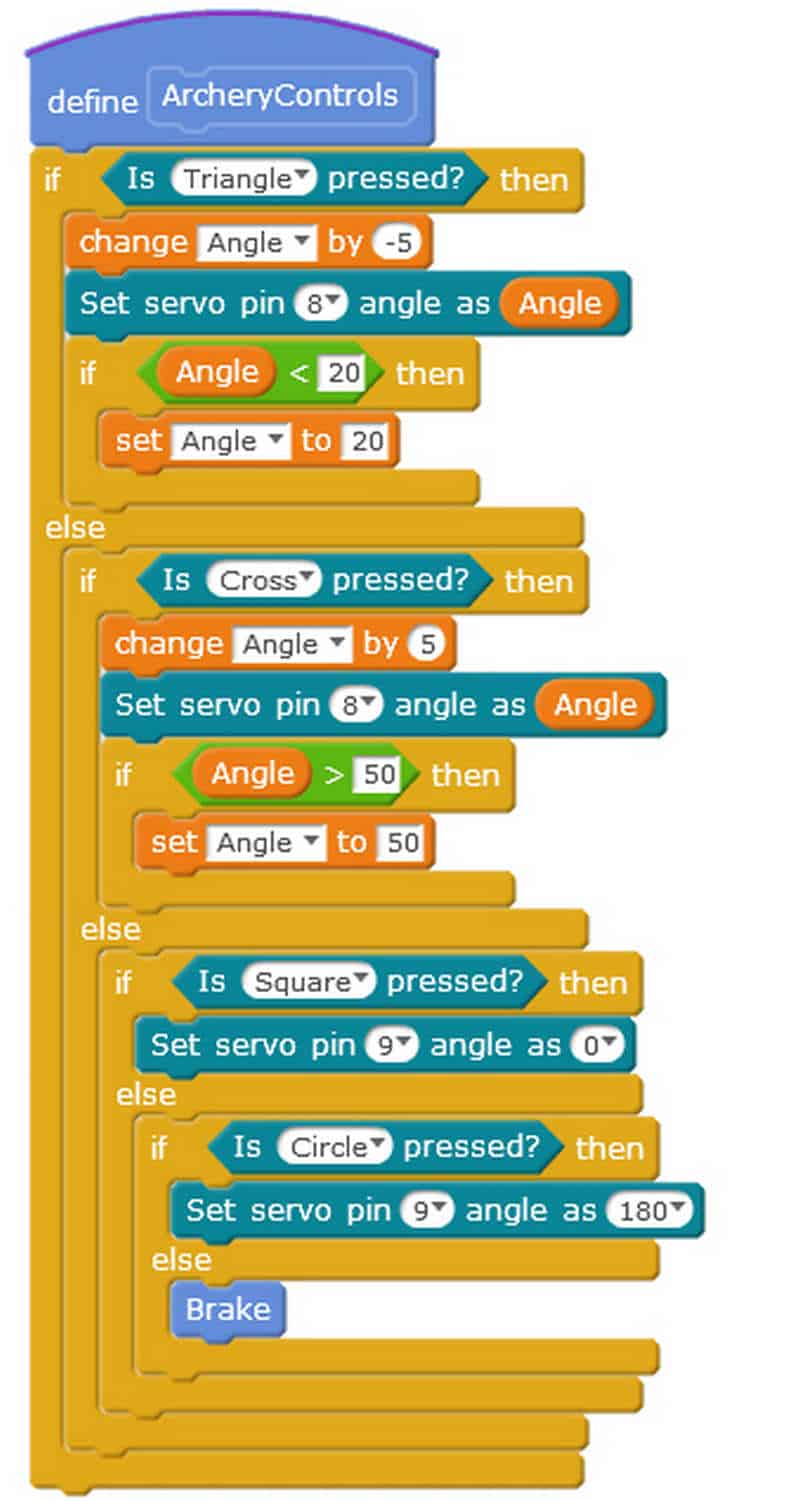
- The top button on the right-hand side(triangle) allows you to elevate the bow assembly by 5° upwards.
- Similarly, the bottom button(cross) is used to lower the bow assembly by 5° with each click.
- The rightmost button(circle) is used to tighten the thread.
- And the button opposite(square) to it is used to tighten the thread attached to the trigger servo which results in losing the arrow.
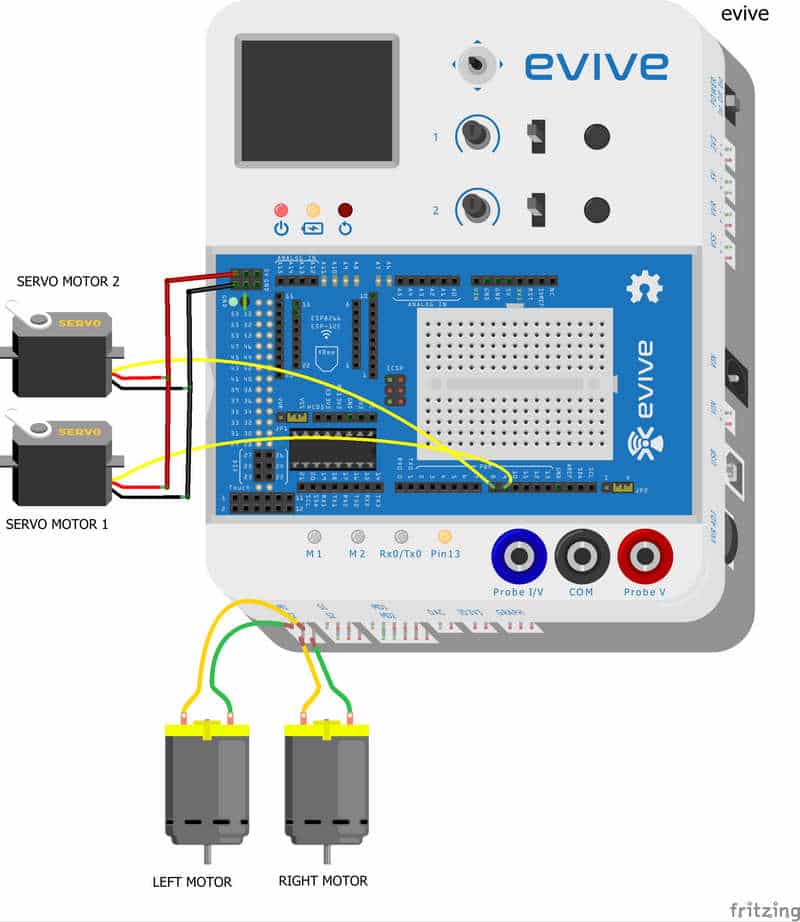
Circuitry of the Robot
- Connect DC Motor to M1 and M2.
- Connect the 2 servo motors to the jumpers on the evive.
- Connect a battery to the evive.
The following shows the connections: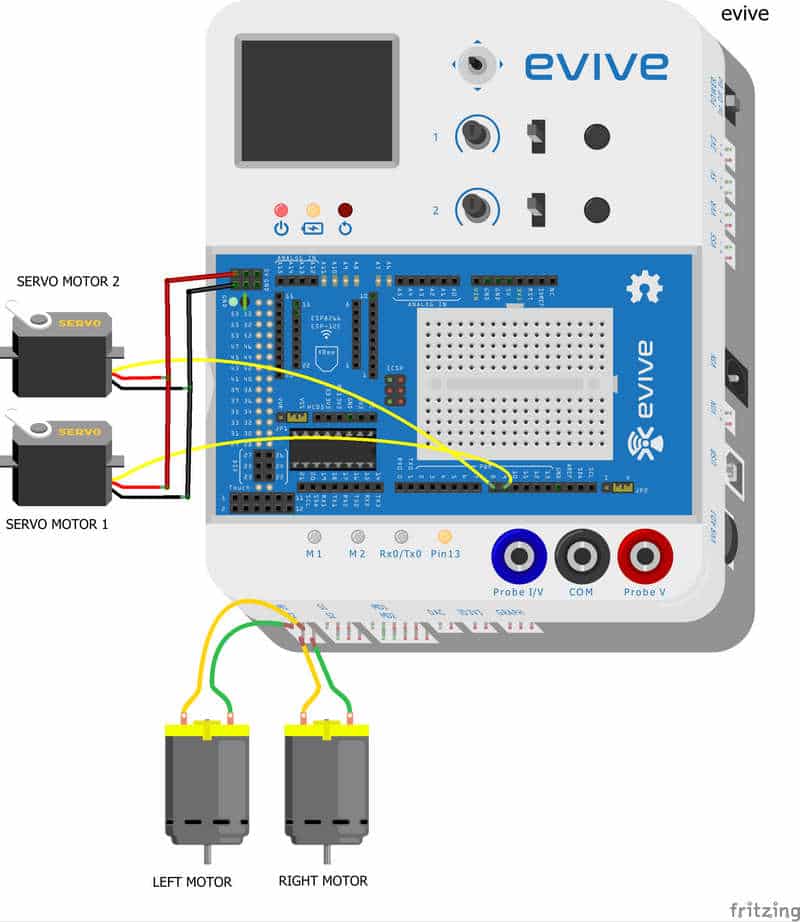
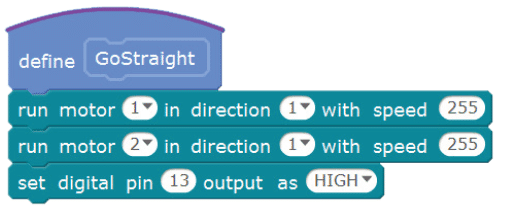
Scratch Code:
The following code should be uploaded to evive.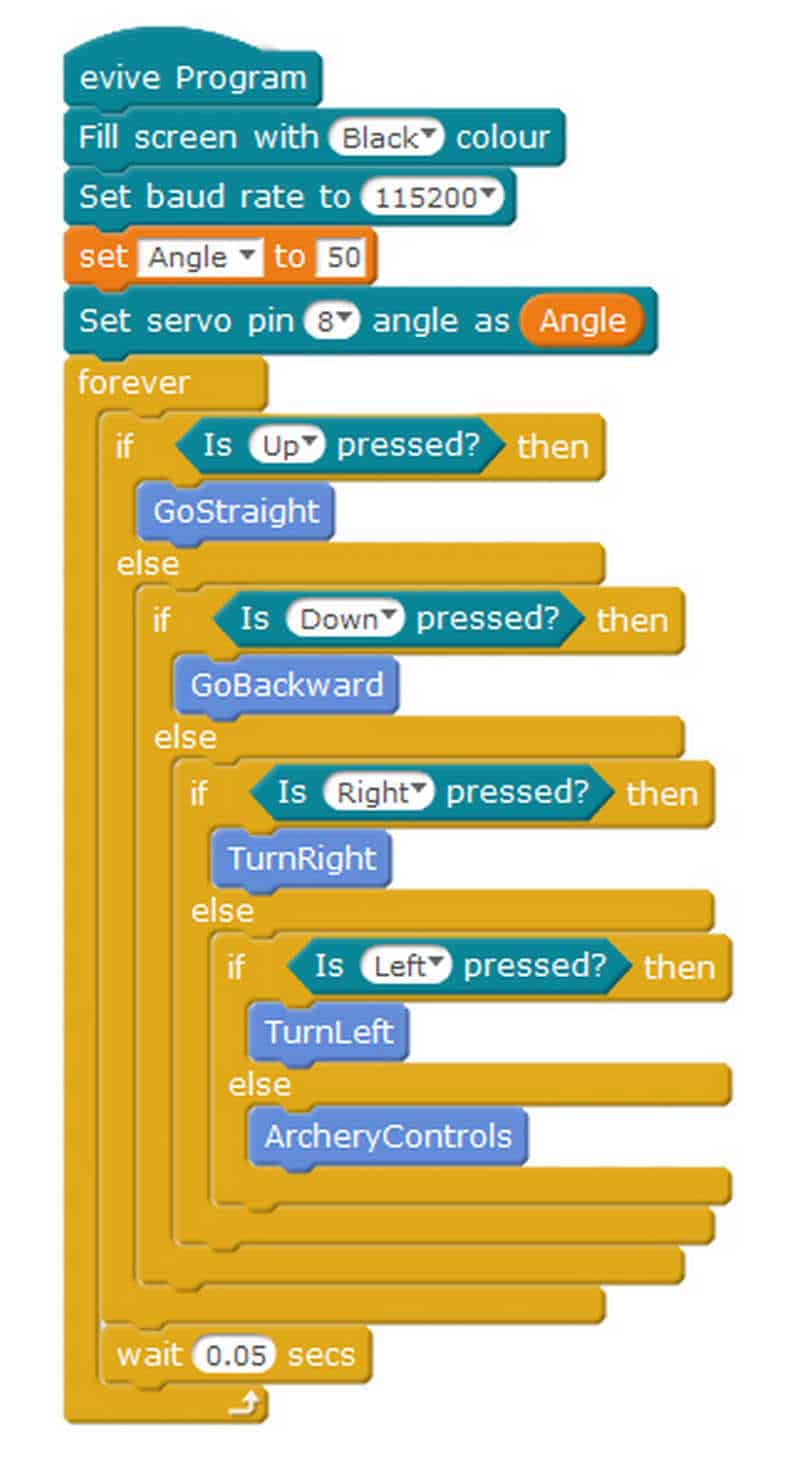
Conclusion
With this, your DIY archery robot is all set to kick down evil! Good luck fighting it!