

Introduction
Is it a boat? Is it a plane? Is it a helicopter? It’s all of these; it’s the *drum roll* DIY hovercraft! In this project, you’re going to learn how to make a DIY hovercraft at your home. This hovercraft ain’t no ordinary hovercraft; it will be programmed using PictoBlox, a graphical programming software with advanced capabilities and controlled using Dabble, a smarter-than-the-phone project interaction, and controller app.
You can download PictoBlox from HERE and get Dabble on Google Play.
So, ready for some bumpin’ and glidin’? Let’s get on to it!
The Cutouts
The structure of the hovercraft is the MDF sheets and some 3D printed parts whose designs can be found here and here. The MDF designs indicate that the following parts: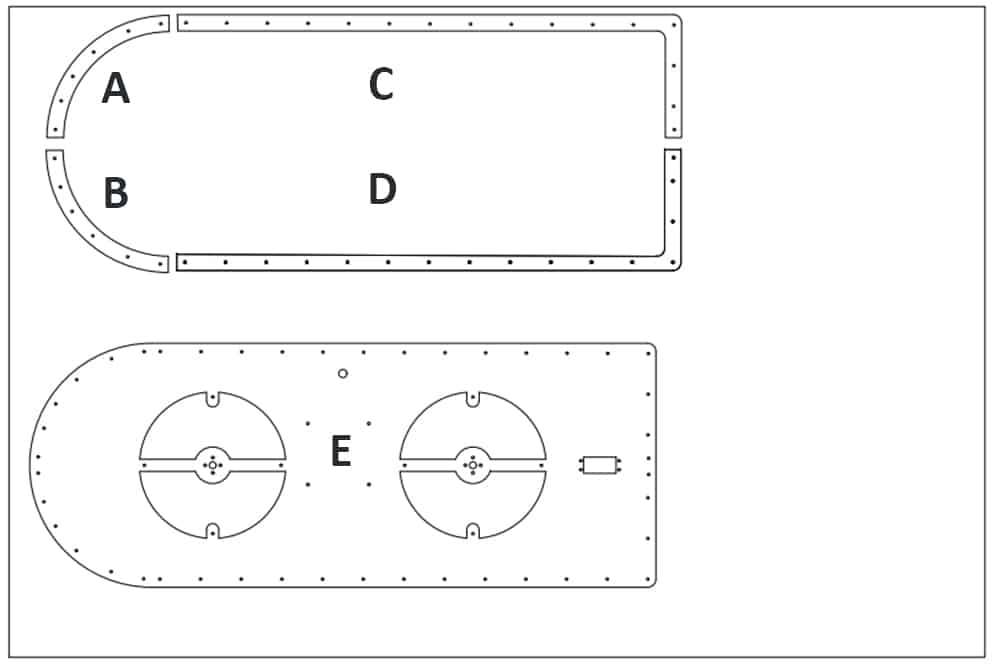
- A, B, C, D: Upper Plates to hold the Skirt
- E: The Platform
Understanding BLDC and ESC
Before we begin with the making of the Hovercraft, let’s first understand the two basic elements of the hovercraft, the BLDC motor, and the ESC.
BLDC
BLDC is the acronym for Brushless DC Motor. They do not have brushes as compared to the normal DC motors. Why BLDC? The advantages of a brushless motor are that they are high power to weight ratio, high speed, and electronic control. And for our hoverboard to lift up from the surface, we need high power motors that rotate with high speed.
ESC
ESC is the acronym of Electronic Speed Controller. As the name suggests it is the device that controls the speed of the motor by regulating the power of the motor.
Making the Platform
The platform, or in general, the Base is where we are going to assemble our entire hovercraft machinery, thus it is should be strong enough to hold the weight and also should be light enough on the hover. The platform is made of MDF Sheet whose design can be found here.
Let’s first understand the design: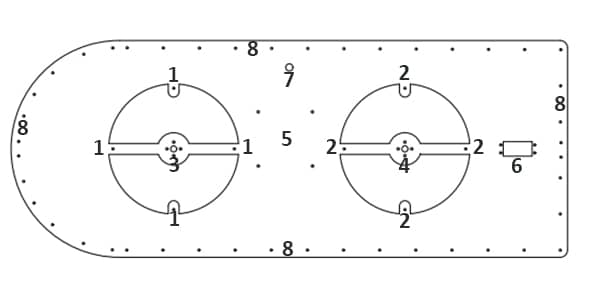
1,2: The holes for handling the lift engine
3,4: For fixing the BLDC motors
5: Fixing evive
6: Fixing the Steering
7: To pass the wires through it.
8: The holes that to hold the skirt
Let’s start the assembly.
-
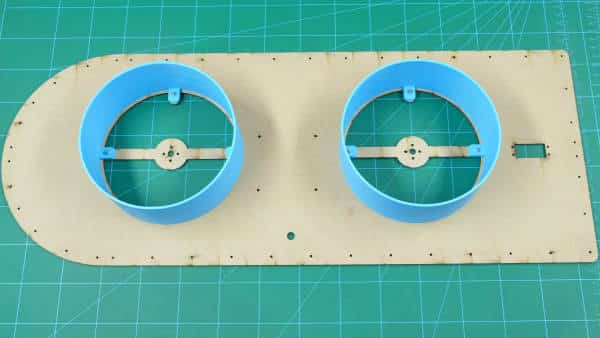
Now, take the platform and 3D printed lift engine case and fix it at position 2 and 3 using M3 bolts of 12mm length and M3 nuts. We will be making the entire assembly of the lift engines in these cases. This will also prevent the air to spread to the side of the propellers. The assembly will look something like this.
-
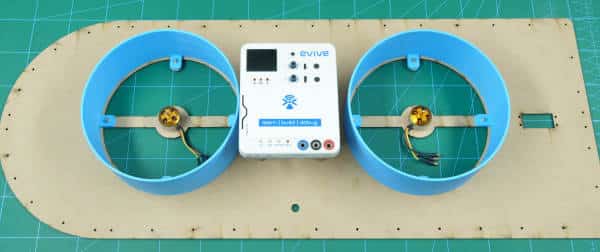
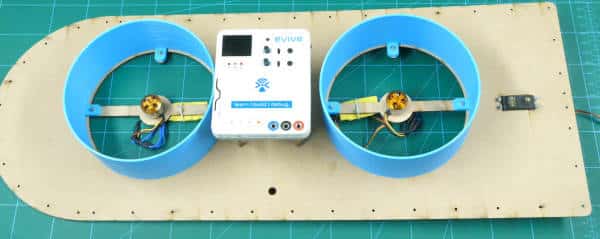
Once done it’s time to add our controller: evive. Now, we will attach evive on the platform but at a height little more than the height of the engine cases. Thus, take 4 male-to-female standoffs of length 50(25+25)mm and attach them to the four corners on the base of evive.

-
Once done, take evive and fix the standoffs in 5 using M3 bolts.

Assembling the Lift Engines
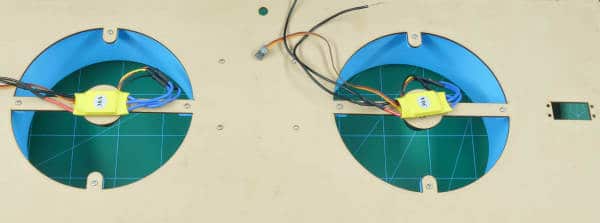
- Now, it’s time to add our lift engines. Our hoverboard will be having two lifting machines to keep the hoverboard stable. Take the two BLDC motors, one for each lifting machine and fix them at 3 & 4 using M3 bolts of 8mm length and M3 nuts.
- Now, we are going to add the ESCs or the speed controllers. Take two ESC one for each motor and connect them to each motor terminal. Once done, fix the ESC underneath the platform using cable ties as shown in the below figure.

Making the Steering
- Time to make the Steering. We are going to use the metal servo for the same.
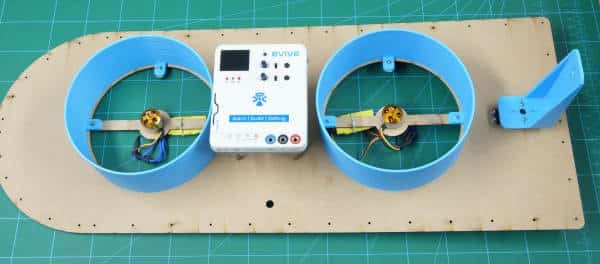
Note: But before we take the servo to any use, we need to set the angle of servo first. Connect the metal servo to any servo channel of evive. Now, switch ON the evive, select controls, select servos, finally select the servo channel on which you have attached the servo and set angle as 90 degrees using the potentiometer. - Once you are done, fix the servo into 6 using M3 bolts of 12mm length and M3 nuts.
- Now take we have added the base of our steering, it’s time to add the steering. Take the 3D printed steering and attach 4 sided-servo horn to it using self-threading screws (Horn and self-threading screw are available as accessories of metal servo)
- Now take this sub-assembly and fix the servo horn on the metal servo using servo bolt. With this, the direction of the steering changes the direction of the hoverboard.
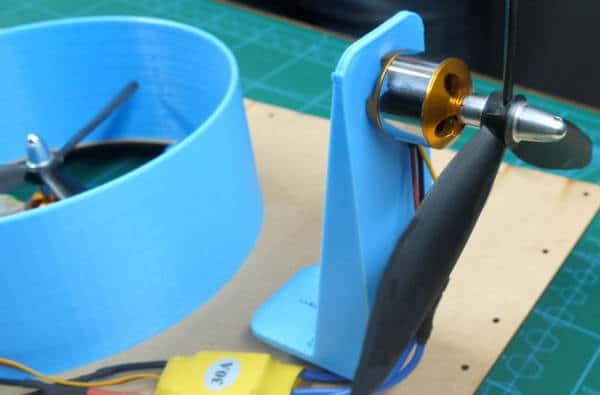
Assembling the Thrust Engine
It’s time to add the thrust engine. The thrust engine is the one that will move your hoverboard in forwarding direction. Thus, we need to add one more BLDC motor here.
You may notice holes in the center of the 3D printed steering. Take the BLDC motor and fix it into these holes using M3 bolts of 8mm length.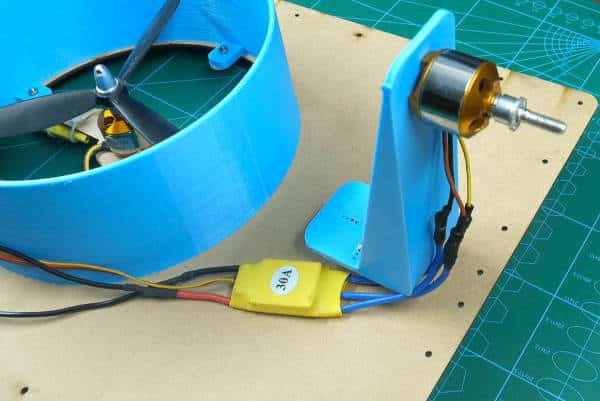
Making the Connection
Time to make the connections. Extend all the wires and pass them through 7 and bring them on the platform to connect it to evive.
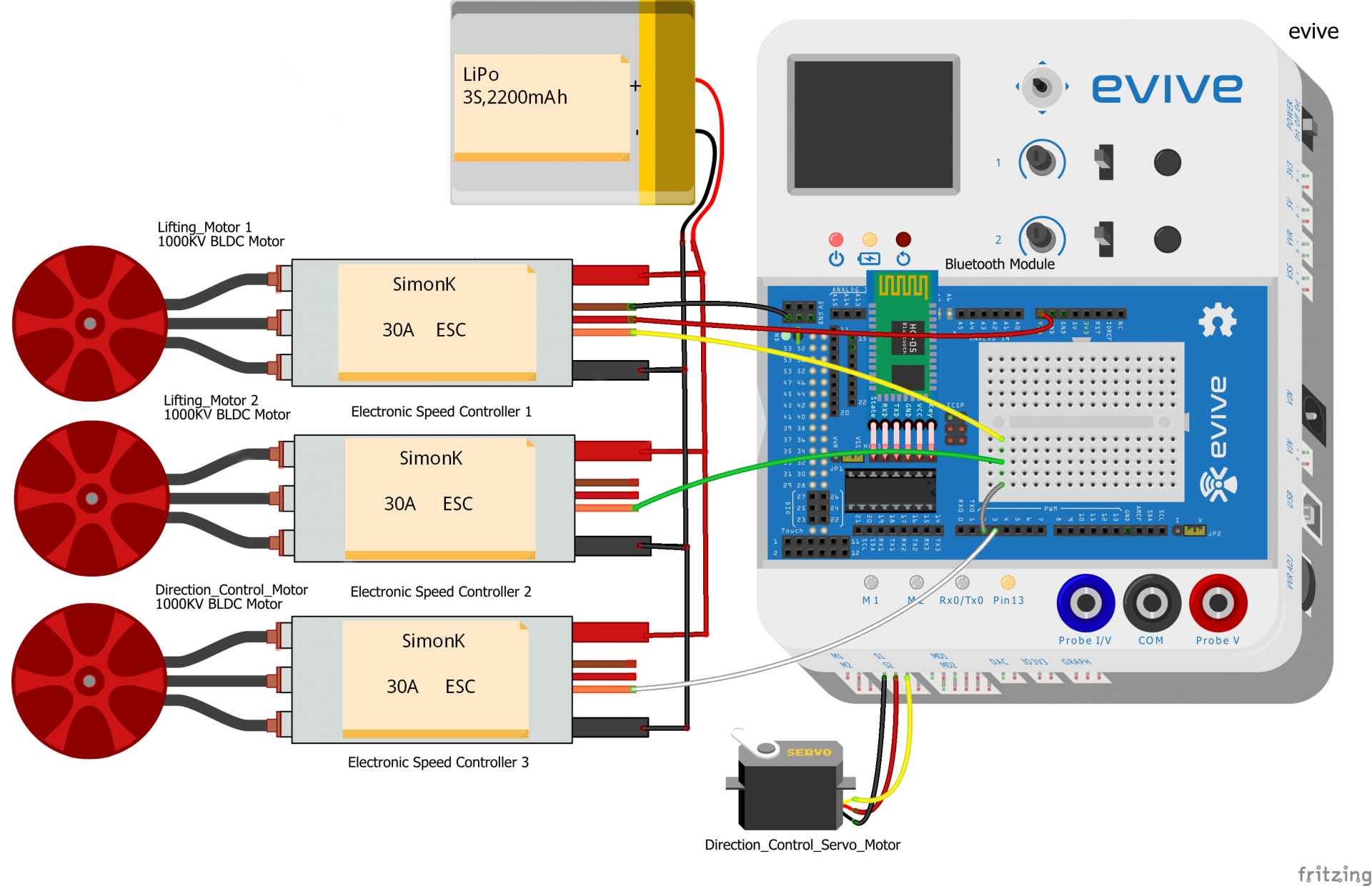
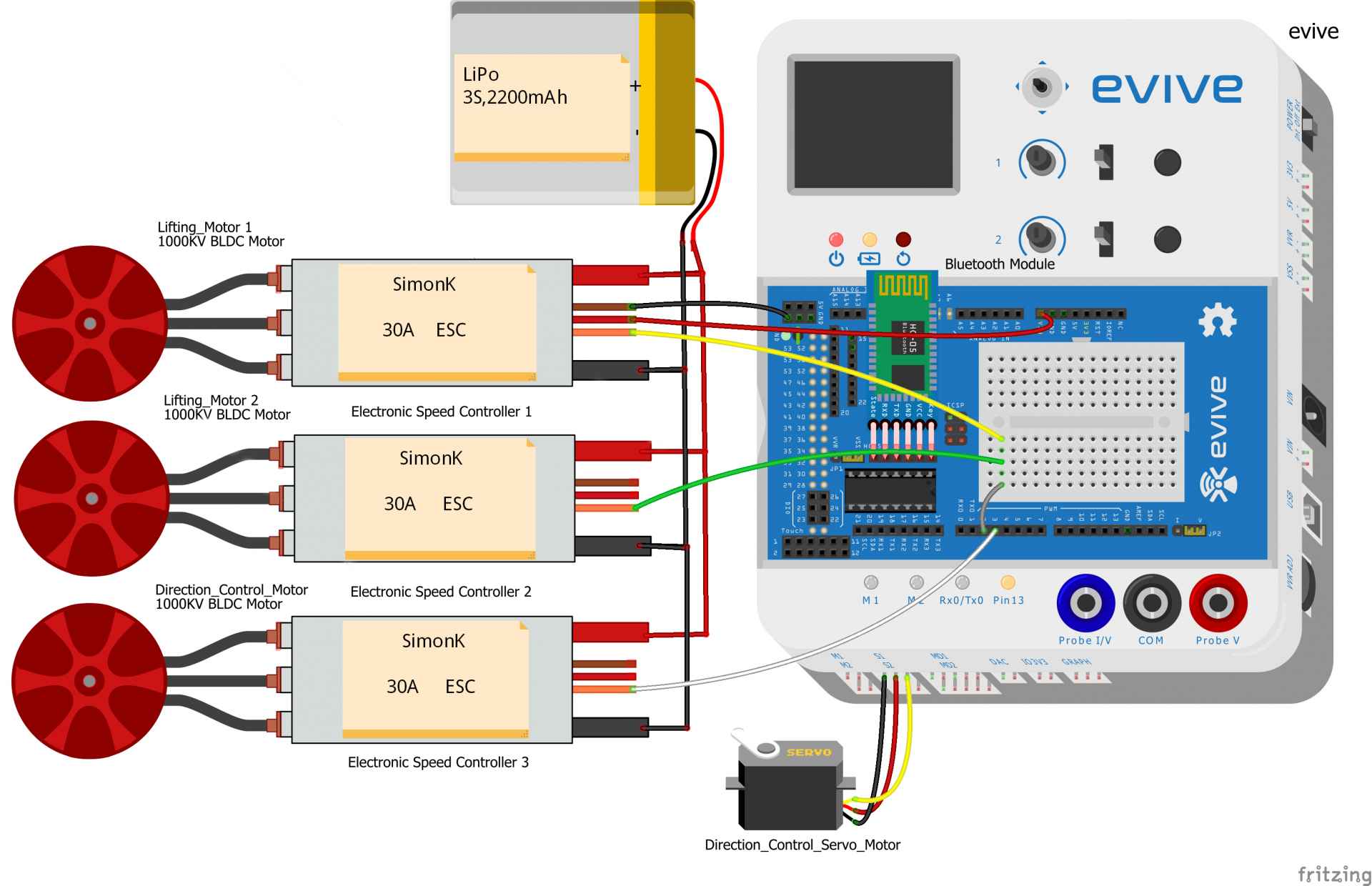
Once done, make the following connections:
- Connect +ve Terminal of the Lithium Polymer battery’s connector to the thick Red wire of each ESC.
- Connect -ve Terminal of the Lithium Polymer Battery’s connector to the thick Black wire of each ESC.
- Now take Lifting Motor 1 and Connect its 3 wires to 3 wires obtained from the output of ESC1.
- Similarly, connect Lifting Motor 2 and Thrust Motor with their respective ESC.
- Connect Steering Servo Motor to S1 port on evive.
- Now take ESC1 and connect its Signal pin to digital pin 2 of evive.
- Similarly, connect ESC 2 Signal pin to digital pin number 2 of evive.
- Now take VCC and GND wires from any one of the ESC and connect it to VIN and GND of evive respectively.
- Connect ESC3 Signal pin to digital pin 3 of evive.
- Finally, connect HC-05 Bluetooth Module on its respective slot present on the evive.
Completing the Engines
Lastly, all three engines are somehow incomplete, the missing part? The propellers. Take the propellers and fit each on the BLDC motors
Adding the Skirt
The skirt is the only part of the hoverboard the touches the ground. The lift engines lift the hoverboard as the BLDC motors push air under the hoverboard and the skirt keeps the air in it.
- Now to make the skirt we are going to use the Plastic sheet. Take the big plastic about the side of the skirt and stick it at the edges of the platform using double-sided tape.

- We need our skirt to be held at a place. Thus, we are going to sandwich between the top plate and the platforms. Thus, you need to first puncture the holes of the platform into the plastic sheet. Attach M3 bolts to the platform such that they point upwards.
- Now, take the upper plates and align them onto the platforms and fix them using M3 nuts.
- Now, keeping the air in the skirt will just add more weight to the hovercraft, thus, we need to make holes in the skirt under the lift engine so that the hovercraft can easily lift in the air that makes it glide in the air easily.

Power it Up
Finally, we need to power up evive which in turn will power up the entire mechanism. Also, we will be needed a lot of power to make the hovercraft hover. Thus, we are going to use the Lithium Polymer Battery.
Connect the battery to evive as given in the connection section.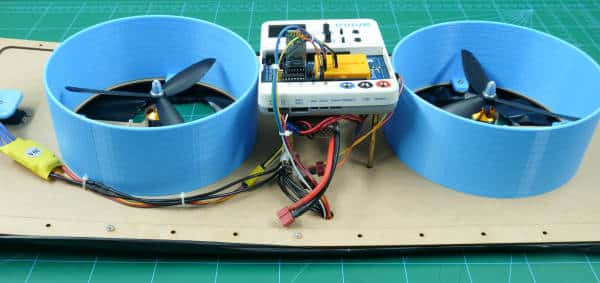
Debugging
The most important…most important part of the entire assembly is that the lift motors should compulsorily throw the air downwards and the thrust motor should throw the air backward. If any single one of the motor does not work as given, we need to reverse the connections, i.e. in all the three BLDC motors there are three wires, interchange any two wires and the motors will work perfectly fine.
The working of the Hovercraft
The basic mechanism of a hovercraft is very simple: our brain- evive powers up all the motors of the hovercraft using Lithium Polymer Battery.
The lift motors are used to lift the hovercraft above the ground as the propellers throw the air downwards into the skirt. The skirt then holds the air, lifting the entire hoverboard up.
The thrust motors throw the air backward, making the hoverboard move forward.
The steering servo is used to change the direction of the hoverboard.
As you already know, we are going to use our Smartphone to control the hovercraft, we are going to use Dabble for the same.
Steps for controlling the hovercraft wirelessly using a smartphone is given below:
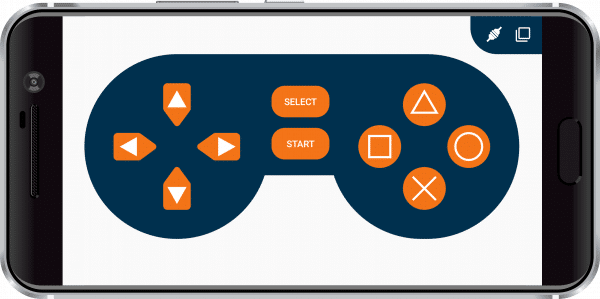
- Open the Dabble app
- Look for your particular Bluetooth module and connect it
- Open the Gamepad module
- Press the “START” button on the gamepad to start hovercraft lifting motors
- Press the “UP” button to start steering fan
- Press the “LEFT” button to take a left turn
- Press the “RIGHT” button to take a Right turn
- You need to press the “START” button again to stop the lifting motors.
Writing the Code
We are going to write our code in PictoBlox– graphical programming software.
- The first block is the main block that will be used to connect Dabble and call out the required blocks when the condition in the if arm is true.
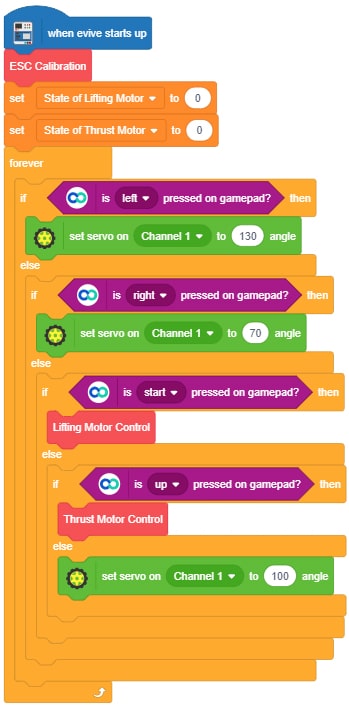
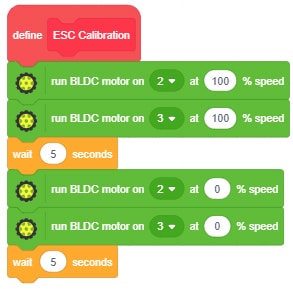
- To calibrate the ESCs.
- This block is used to control(start and stop) the Lifting Motors.

- This block is used to control(start and stop) the Thrust Motor.

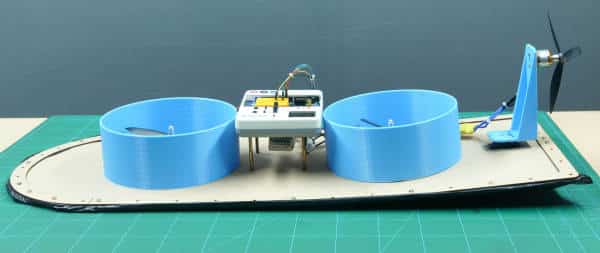
Conclusion
With this, your DIY Smartphone Controlled Hovercraft is ready! One command and it will be up and glidin’














 7-13 screenshot")
