


Introduction
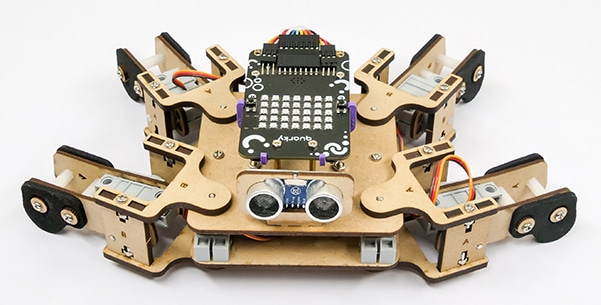
The project demonstrates how to make the crawling motion with Quadruped using individual servo control.
Logic
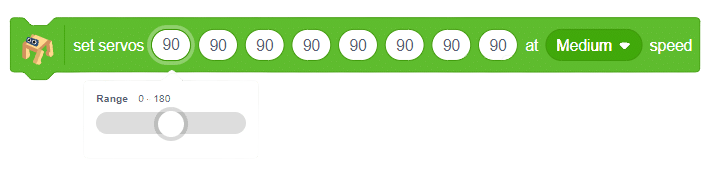
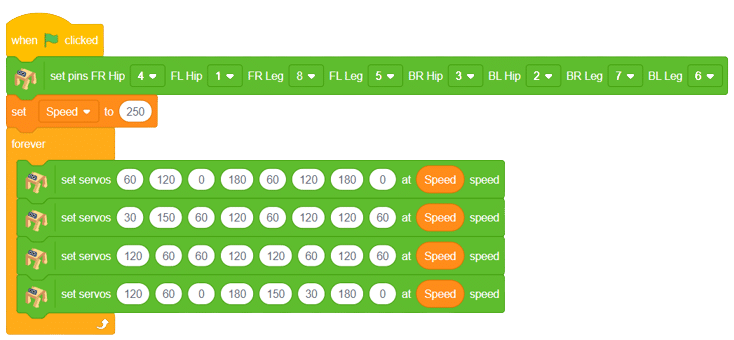
For this project, we are using the set servos () () () () () () () () at () speed block that sets the servo motors of the quadruped to the specified angles at the specified speed.
There are four positions of the robot we are going to make to create the crawling motion:
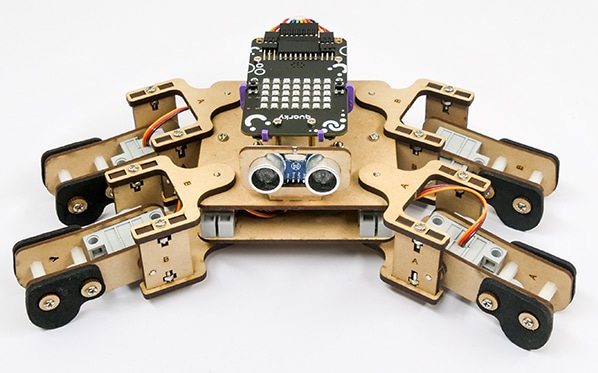
- Position 1

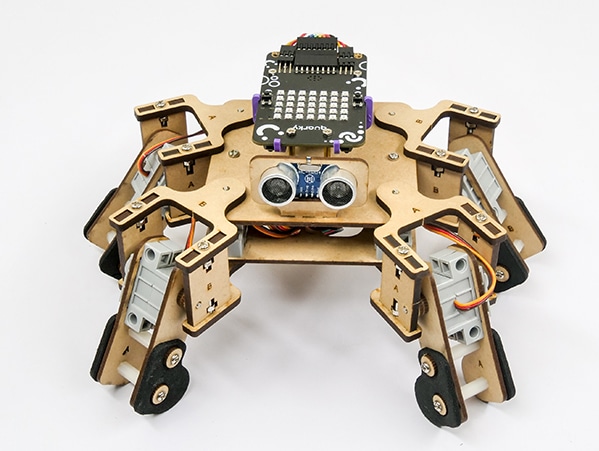
- Position 2

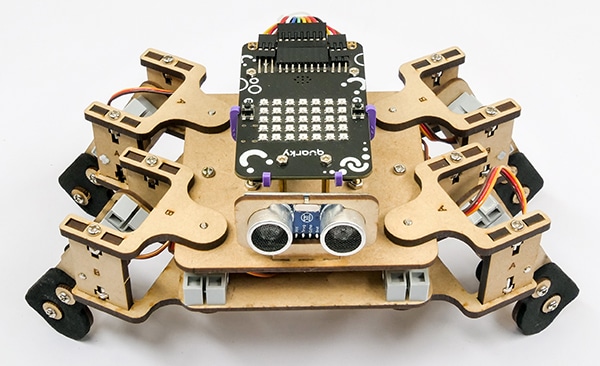
- Position 3

- Position 4

Code
Output