


Introduction
A sign detector Quadruped robot is a robot that can recognize and interpret certain signs or signals, such as hand gestures or verbal commands, given by a human. The robot uses sensors, cameras, and machine learning algorithms to detect and understand the sign, and then performs a corresponding action based on the signal detected.
These robots are often used in manufacturing, healthcare, and customer service industries to assist with tasks that require human-like interaction and decision-making.
Code
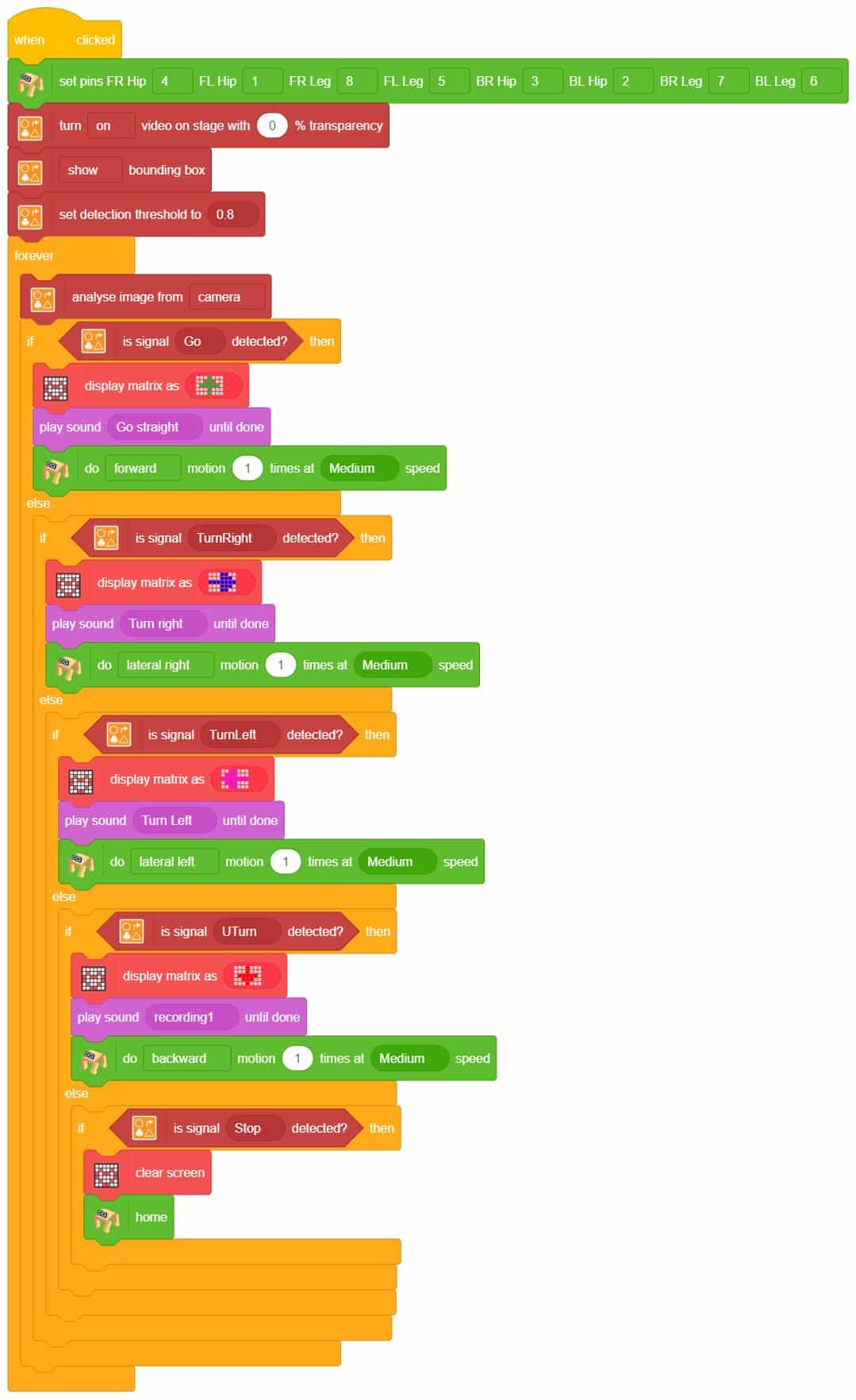
Logic
- Then, it sets up the quadruped robot’s camera to look for hand signs and tells it how to recognize different signs.
- Next, the code starts a loop where the robot looks for hand signs. If it sees a sign, it says the name of the sign out loud.
- Finally, if the robot sees certain signs (like ‘Go’, ‘Turn Left’, ‘Turn Right’, or ‘U Turn’), it moves in a certain direction (forward, backward, left, or backward) based on the sign it sees.
- So, this code helps a robot understand hand signs and move in response to them!