The function makes the servo motors connected to the wheels orient towards the right. This orientation is used for making the robot turn right in a circle.
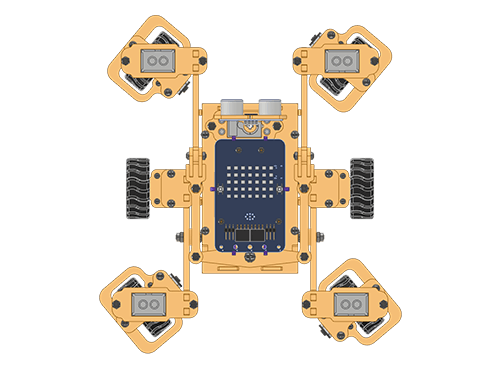
The robot orientation at 20 degrees right position: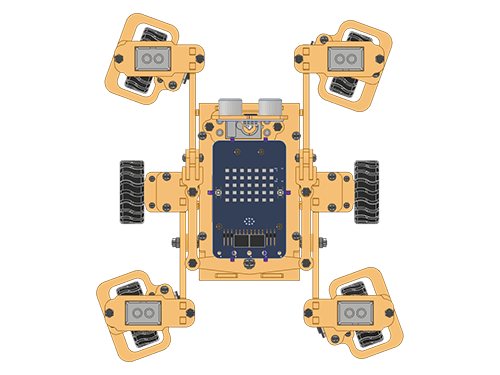
The robot orientation at 40 degrees right position: