The angle by which the servo should rotate inwards.
-90 to 90
40
Description
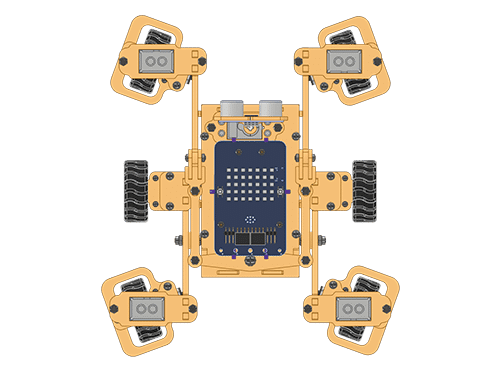
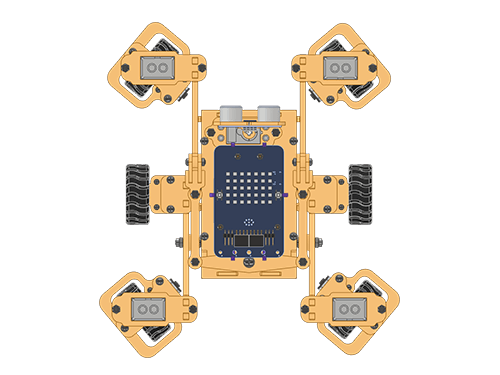
The function makes the servo motors connected to the wheels orient inwards. This orientation is used for making the robot turn right and left efficiently.
The inward angle of 20 degrees:
The inward angle of 40 degrees:
Example
There are no examples documented for this article.