Introduction
Till now, we’ve made robots that can zoom around but only on the ground level. This time, we thought of taking their moving ability a bit further and make them capable of reaching new heights. Thus came into existence the *drum roll* Smartphone-controlled stair-climbing robot! Program it in PictoBlox – a versatile graphical programming software with advanced capabilities, and control with Dabble – our ingenious project-making and controller app – in your hands, you hold the key to it.
Download PictoBlox from HERE and get Dabble from Google Play.
So, are you ready for taking your robot to the next level? Then lets’ get started!
The Cutouts
Before we start making the Stair Climbing Robot, we need to understand its parts. Most of the body structure of the robot is made of MDF sheet whose design can be found here. The labels in the image below indicate the following use:
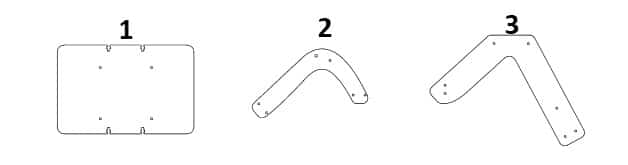
- The Base Plate
- The Front Leg (x 2)
- The Back Leg (x 2)
Making the Skeleton
- Our robot in total will have six legs. Two front, two middle, and two back legs. Note: In our design, the front and the middle legs are together in a piece that looks like J.
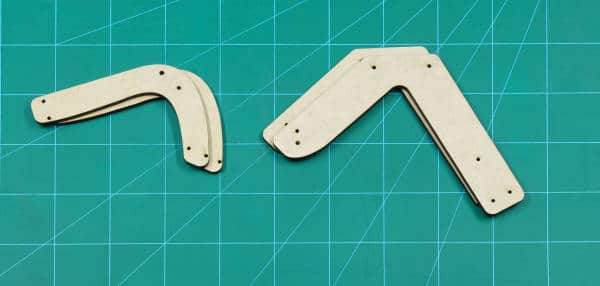
- Take the front leg and the back leg and attach them together in the holes given using M4 nuts and bolts. Repeat the same step for the other side too. Your legs will look something like the one in the image given below.
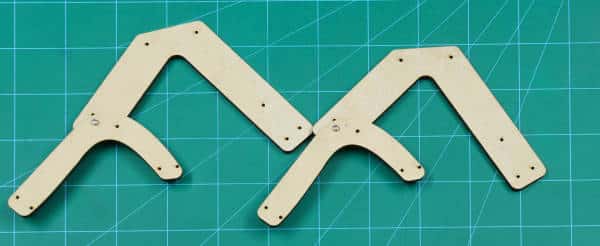
- Once done, its time to add the upper body, where we will be adding our nervous system. Take the base plate or the body and attach a pair of legs to it, one on each side using M3 nuts and bolts.


With this your skeleton is complete.
Time to Make it Move
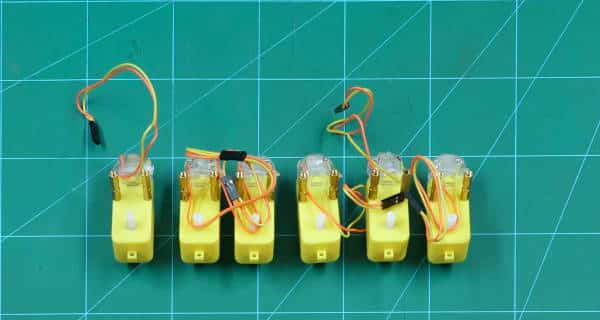
- The skeleton that we just made have legs but it still cannot move. This is where DC motors and wheels come to the rescue. Our stair climbing robot has six legs this we will be needing six motors and six wheels.
- Before we attach motors to the skeleton, we will test the motors using evive’s firmware. Connect the motor to any ports (M1 or M2). Switch on evive, select Controls from the menu, then select Motors, and finally select the motor channel you have attached your motor too. You can vary the speed of the motor using the corresponding potentiometer and the direction using the slide switch.
- Once tested, attach 8mm female-to-female standoffs using M3 bolts of 25mm nuts, two to each motor as shown in the figure below. We are using standoffs to attach the motors to the skeleton.
- Once you have attached the standoffs, take these motors and attach the motors to the skeleton using M3 nuts
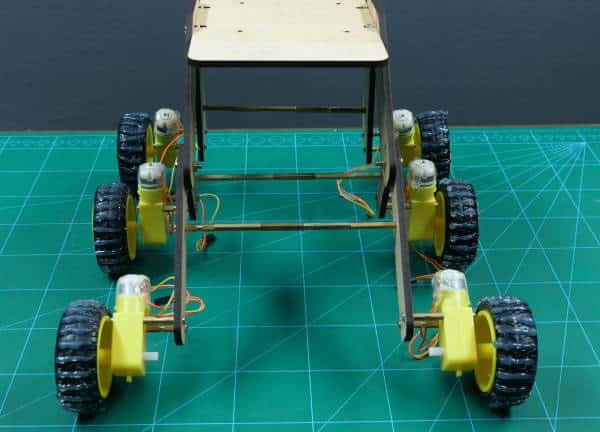
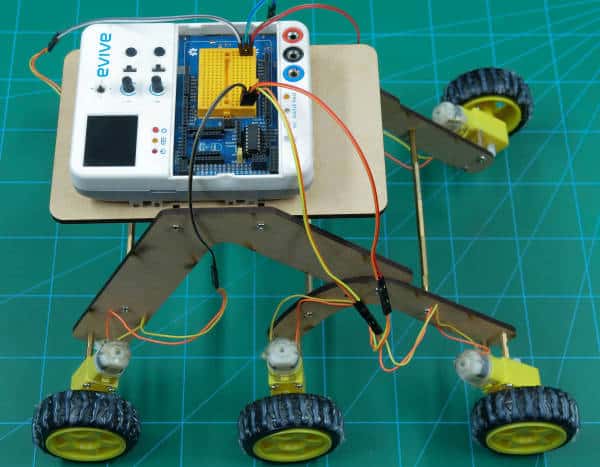
- Once you have your motors attached, attach the feet…wheels to the motors. With this the skeleton of the robot’s body is ready. Make sure you make extra lines on wheels using Hot Glue to give more friction to the wheels.
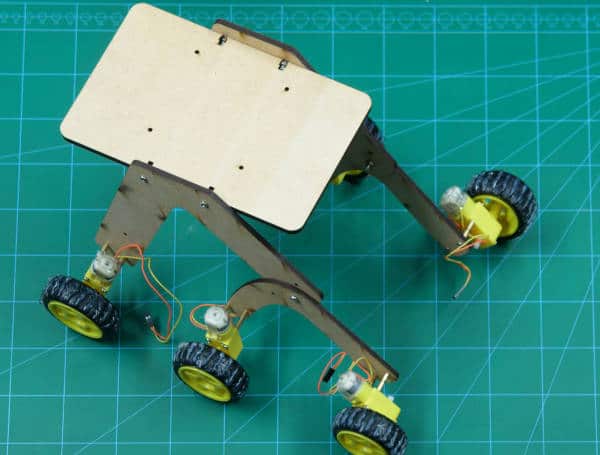
 The original rocker-bogie does not have stub axels. But we are going to add them into our robot to keep the robots more stable.
The original rocker-bogie does not have stub axels. But we are going to add them into our robot to keep the robots more stable. - Take a series of standoffs the one that fits between the two legs and fixes it using M3 nuts to the legs. This will keep your legs stable.
Adding the Nervous System
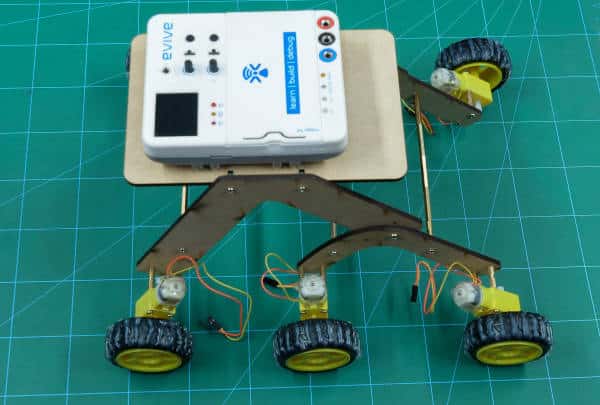
- Time to add the brain, that will be controlling the entire body. Our brain here is our very own evive. Mount evive on the body using M3 bolts.
- The cables will act as nerves that will connect the legs to the brain. Connect the motors of one side parallelly onto the breadboard.
- Similarly, connect the motors of the other side to the breadboard as shown in the figure.
- Time to add the motor driver, the motor driver so that we can supply enough power to all the six motors. Fix the motor driver using a double-sided tape onto the space given on the plate.
- Once done, its time to connect our motor driver to the brain.
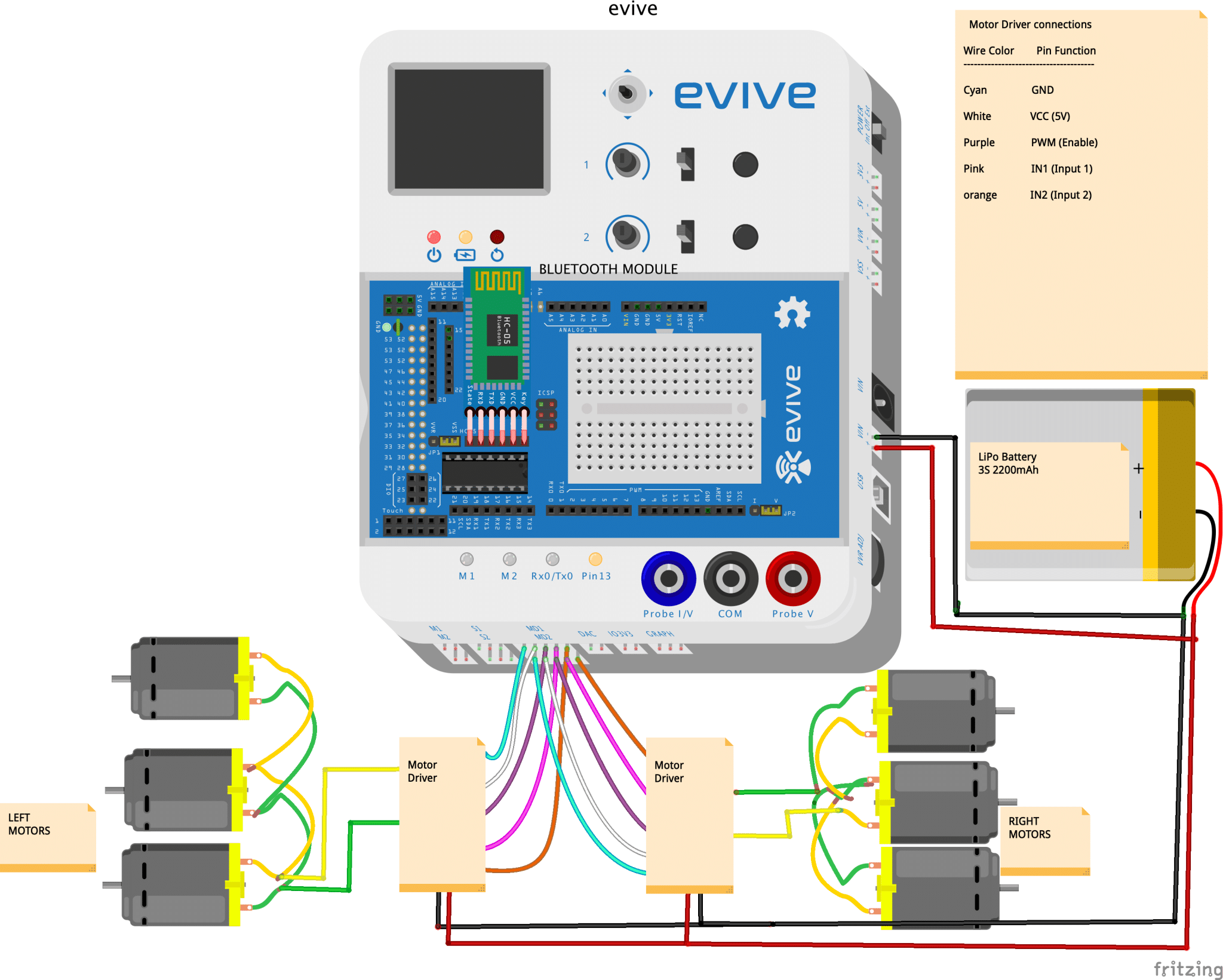
- Connect GND-A, PWM-A, INA1, and INA2 pins of the left motor driver to MD1 port on evive.
- Connect GND-B, PWM-B, INB1, and INB2 pins of the right motor driver to MD2 port on evive.
- Connect VCC and GND of the motor driver to the VCC of evive.
- Finally, connect OUTA1 and OUTA2 to the left motor and OUTB1 and OUTB2 to the right motor
- Then, add the Bluetooth Module as we need to control the robot using a Smartphone. Connect Bluetooth Module (HC05) to the evive at the slot given.
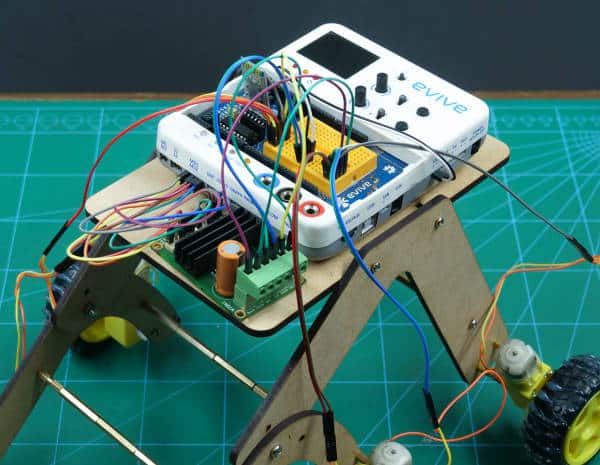
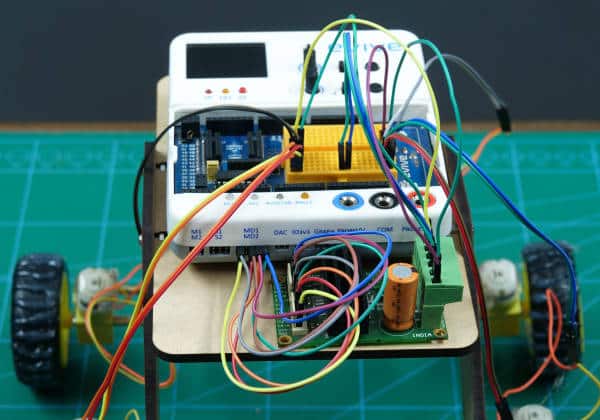
You can see the following image for making the entire nervous system.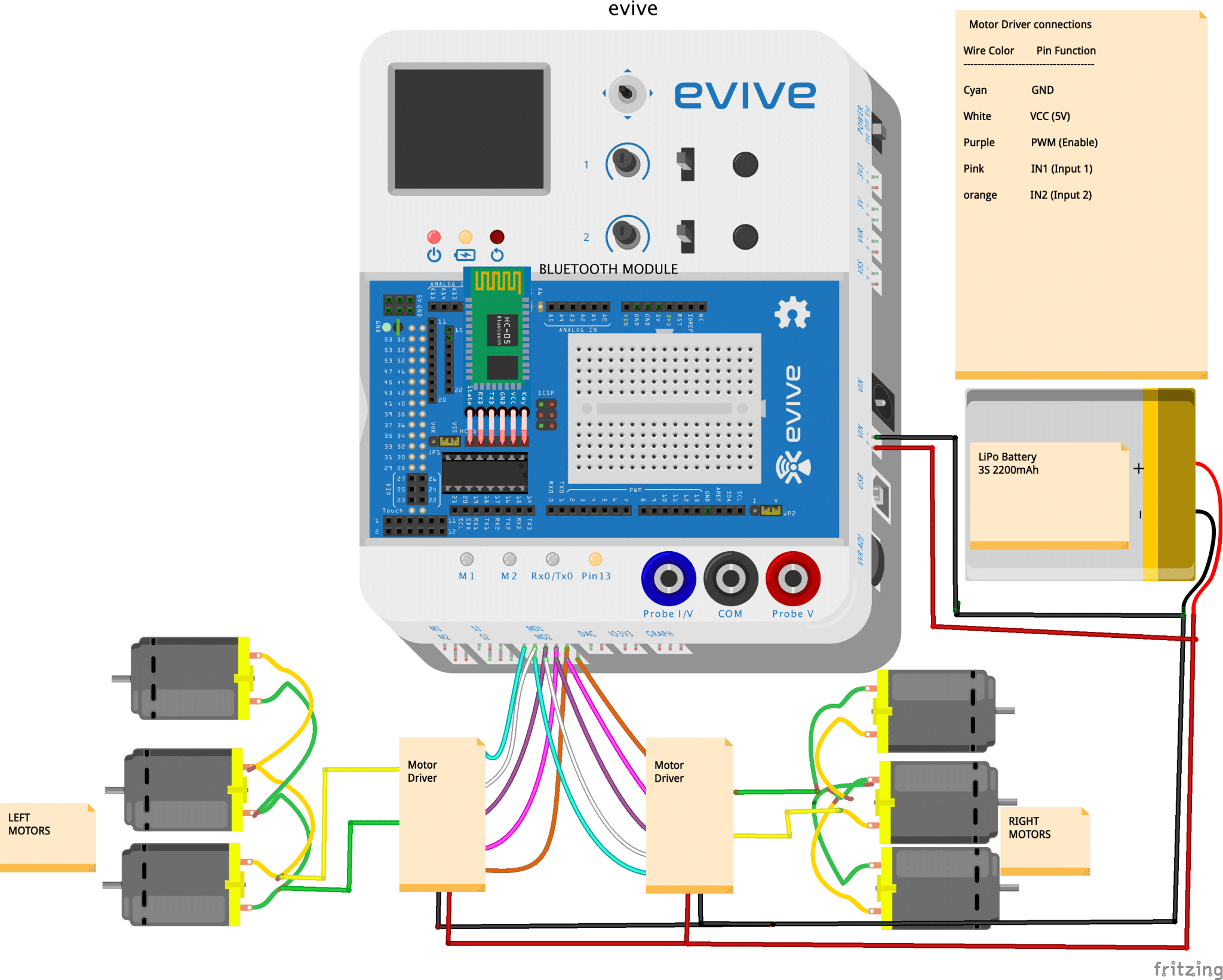
Powering up the System
The powerhouse in our case is none other than the Battery. Connect the Lithium polymer Battery to VIN of evive. 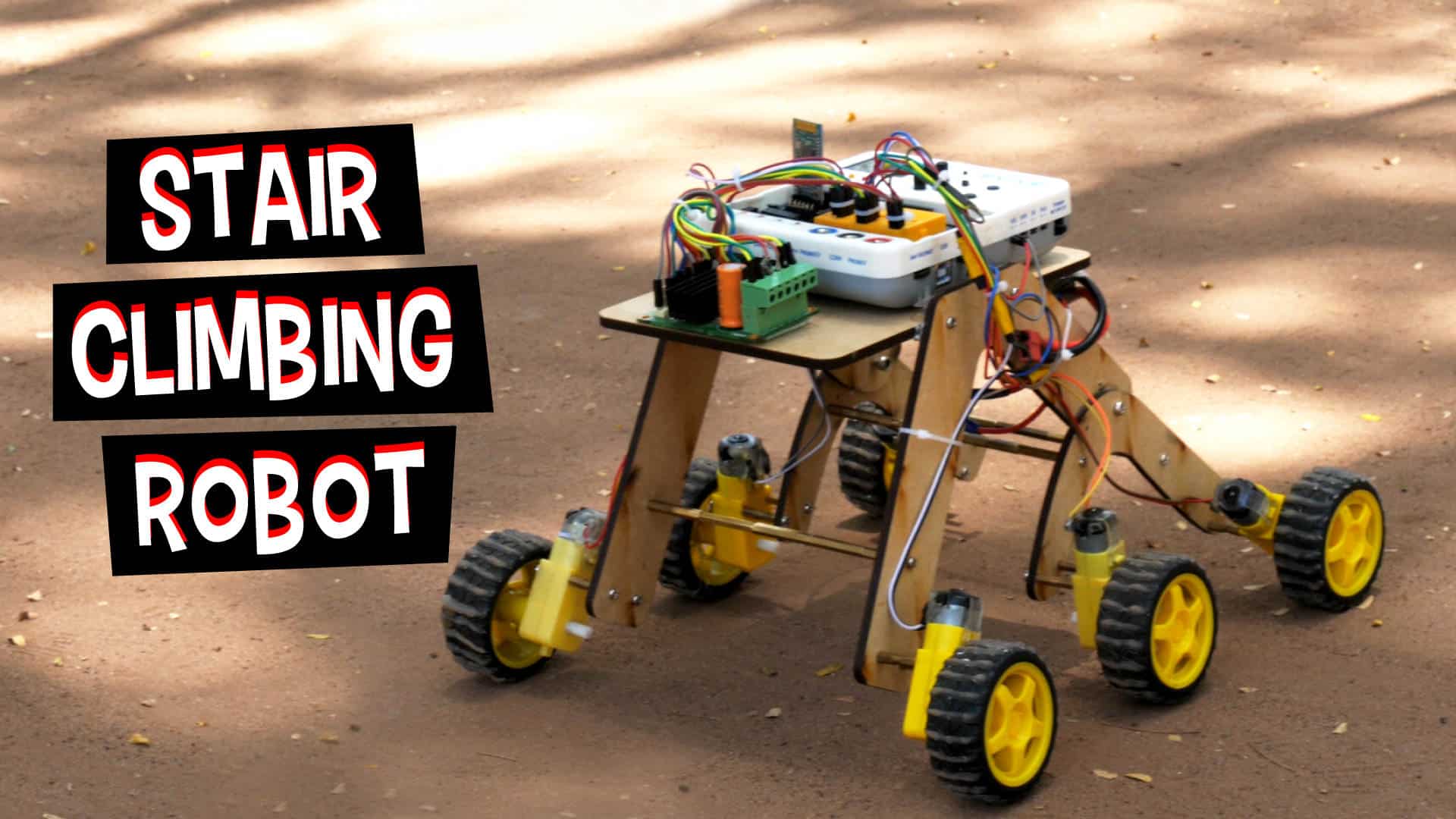
Coding the Signals
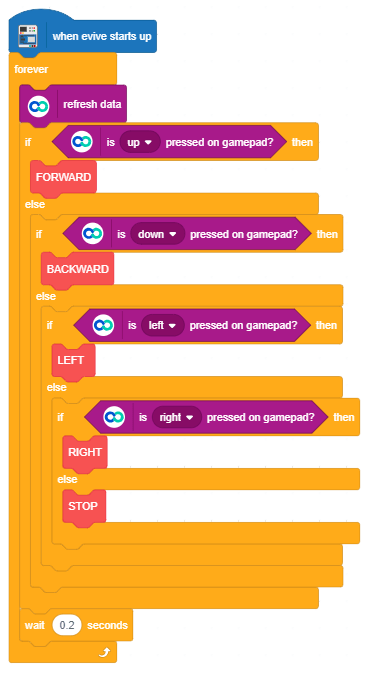
As we know that the brain sends the signal to the body, similarly evive will send a signal to the robot. But what will be those signals? How will evive know what signal to send? That’s what we need to code and upload it into the brain.
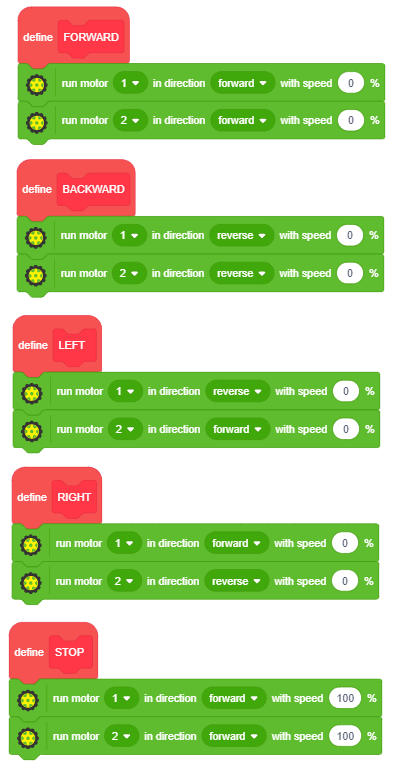
To make the coding process simpler we are going to code in the graphical programming software called PictoBlox. You can either write the following code by dragging and dropping a few blocks or you can directly download the code given here.
Looking into the System
Stair climbing robot works on the concept of the rocker-bogie mechanism. The robot can climb onto any obstacles stairs, bumps, etc. It can move along any surface be it sand, rocks, concrete, or grass as it has suspension arrangments. The front wheel of the robot hits the obstacle real hard and as the friction of the wheels is more, it lets the robot to climb the obstacle.
Also, we are going to control it using our Smartphone. Dabble lets you connect your smartphone to evive.
The buttons of Gamepad are used for the following function: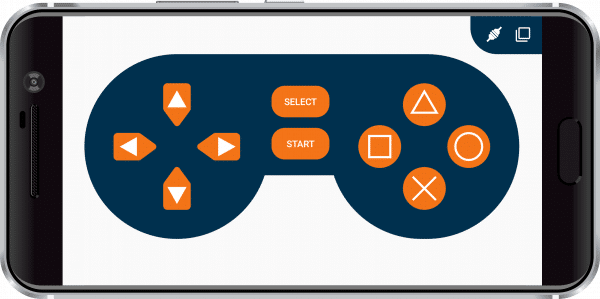
- Up: Move the robot forward
- Down: Move the robot backward
- Right: To turn the robot right
- Left: To turn the robot left
Conclusion
With this, your Smartphone-controlled stair-climbing robot is ready! Go ahead and reach new heights together!