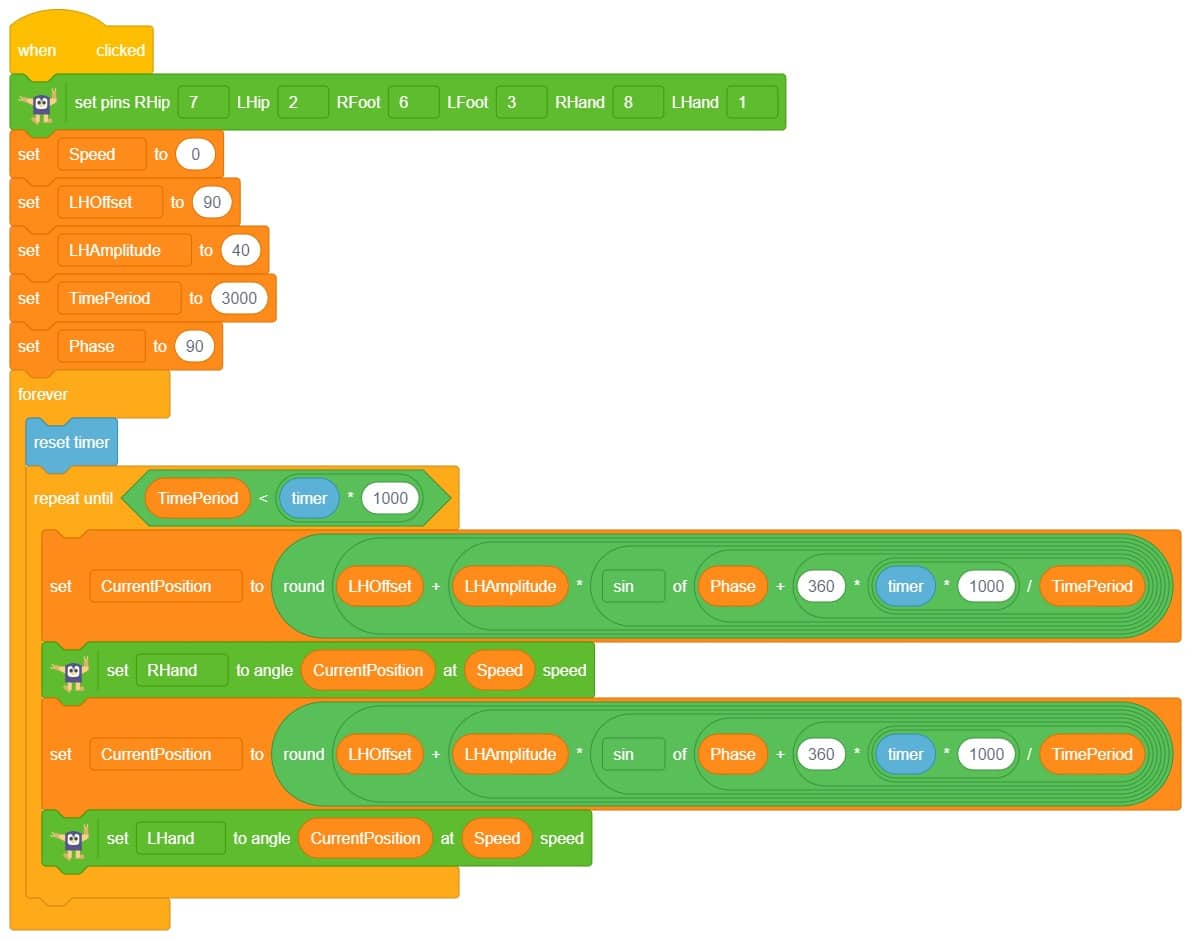
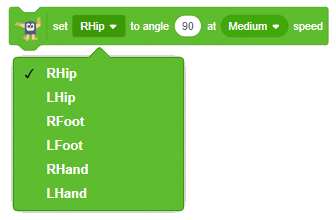
The block sets the selected servo motor angle to the specified angle in the specified time. This creates a smooth motion for the servo motor from the current angle to the specified angle.

The block sets the selected servo motor angle to the specified angle in the specified time. This creates a smooth motion for the servo motor from the current angle to the specified angle.
The hand-controlled motion refers to the ability to control the movement of an object using hand gestures or motions. This can be accomplished through the use of various technologies, such as sensors or motion tracking devices, that detect the movements of the hand and translate them into commands that control the motion of the object.
Hand-controlled motion has a wide range of applications, including in virtual reality and gaming, robotics, prosthetics, and assistive technologies for individuals with disabilities. By allowing for intuitive and natural control of motion, hand-controlled motion can enhance the user’s experience and increase their ability to interact with and manipulate the world around them.