This block should be included with the Mars Rover for the first time as it calibrates the angles of all five servo motors and saves the angles in the memory of Quarky.
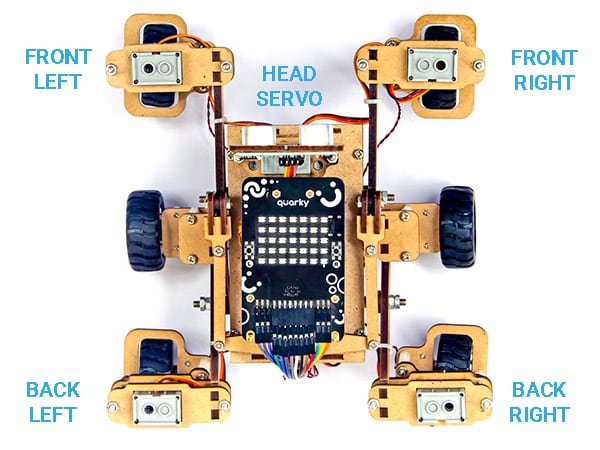

Note: Please make sure that all the servos are at 90° as shown in the image above.