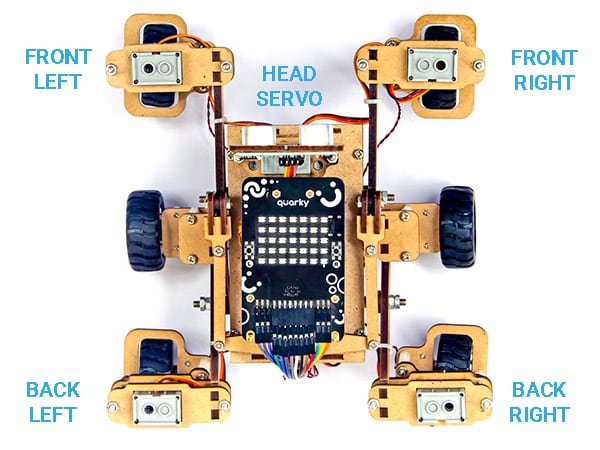
Function Definition: setwheelsangle(Front Left = 90, Front Right = 90, Back Left = 90, Back Right = 90)
The function sets the servo motors of the Mars Rover to the specified angles.