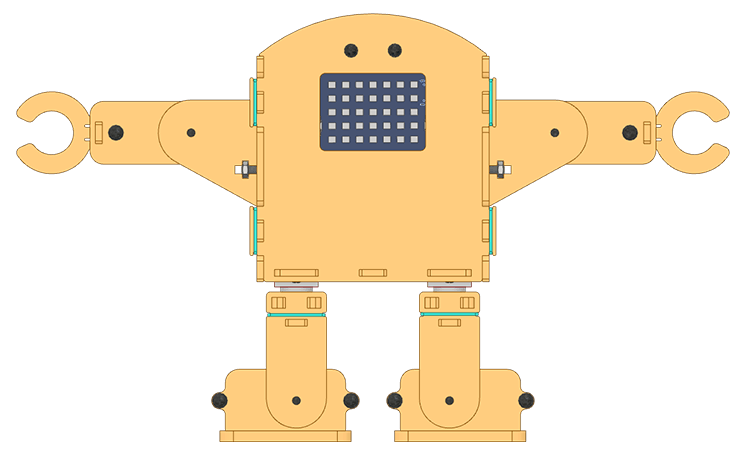
Function Definition: sethandoffset(Left Hand Offset, Right Hand Offset)
The function calibrates the angles of the hip and foot servo motors and saves them in the memory of Quarky.