The function initializes the humanoid robot object in Python and maps the 6 servos to the specified pins.
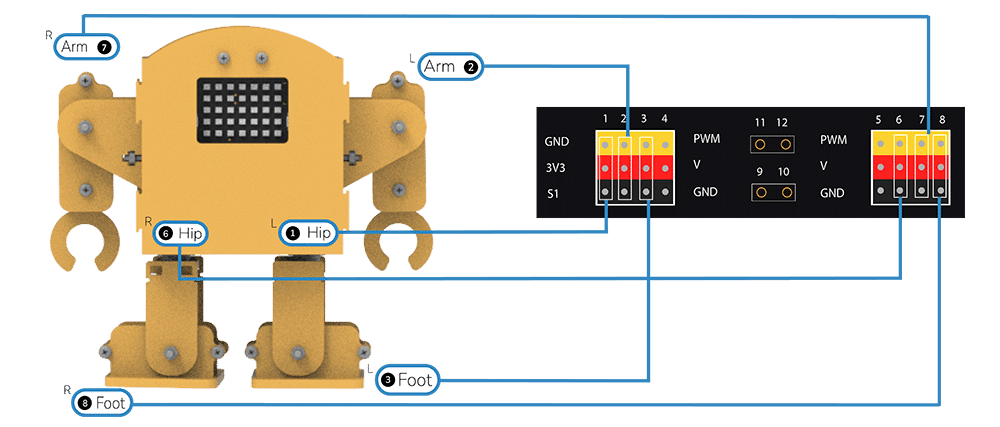
Function Definition: Humanoid(Right Hip = 7, Left Hip = 2, Right Foot = 6, Left Foot = 3, Right Hand = 8, Left Hand = 1)
| Name | Type | Description | Expected Values | Default Value |
|---|---|---|---|---|
| Right Hip | int | The servo port at which the Right Hip Servo Motor is connected. | 1-8 | 7 |
| Left Hip | int | The servo port at which the Left Hip Servo Motor is connected. | 1-8 | 2 |
| Right Foot | int | The servo port at which the Right Foot Servo Motor is connected. | 1-8 | 6 |
| Left Foot | int | The servo port at which the Left Foot Servo Motor is connected. | 1-8 | 3 |
| Right Hand | int | The servo port at which the Right Hand Servo Motor is connected. | 1-8 | 8 |
| Left Hand | int | The servo port at which the Left Hand Servo Motor is connected. | 1-8 | 1 |
The function initializes the humanoid robot object in Python and maps the 6 servos to the specified pins.