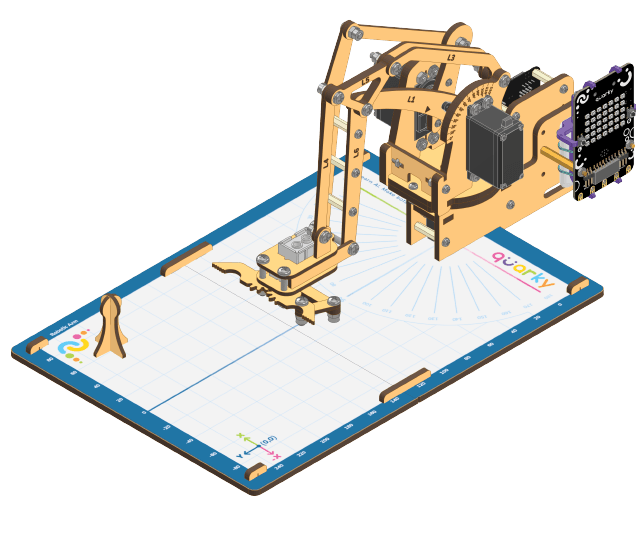
This guide will show you how to put together the Quarky Robotic Arm and prepare it for fun activities. In the end, you will have the Robotic Arm looking like this:
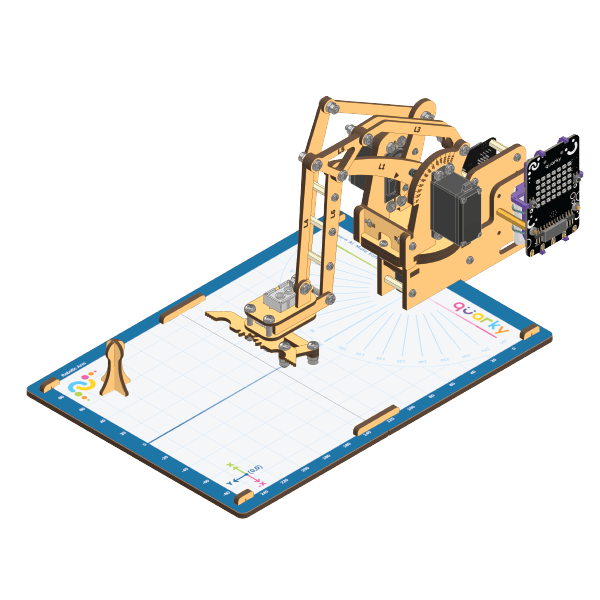
Let’s begin.
Servo Initialization
Firstly we need to calibrate the servo motors, i.e., we need to first set all eight of them to 90 degrees. This will ensure that the angle of each servo motor is properly aligned. Follow the steps:
- Connect the first 180° Servo Motor to the first Quarky Servo Connector.
 Note: Keep the Brown wire of servo towards left white square mark on the Quarky.
Note: Keep the Brown wire of servo towards left white square mark on the Quarky.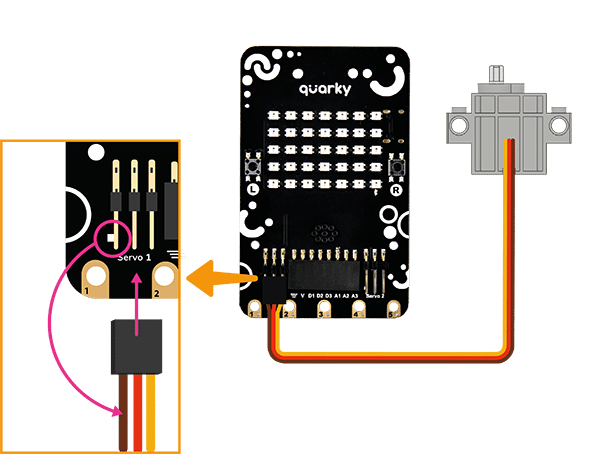
- Connect Quarky to your laptop using a USB cable.
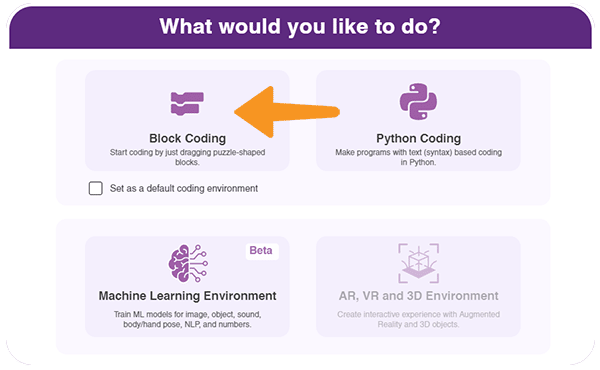
- Open PictoBlox on your desktop. After that, select Block Coding as your coding environment.
- Then, click the Board button in the toolbar and select Board as Quarky.
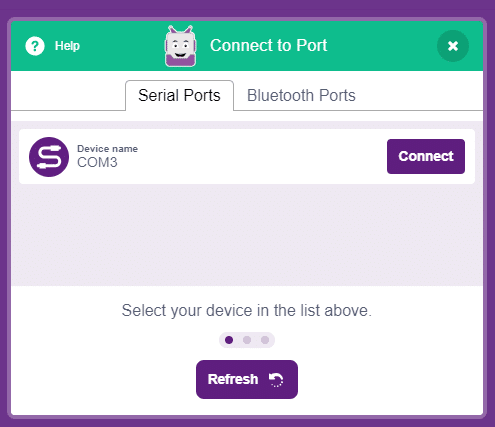
- Next, select the appropriate Serial port if the Quarky is connected via USB or the Bluetooth Port if you want to connect Quarky via Bluetooth and press Connect.
- Quarky is now connected to PictoBlox. Create the following script:
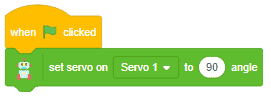
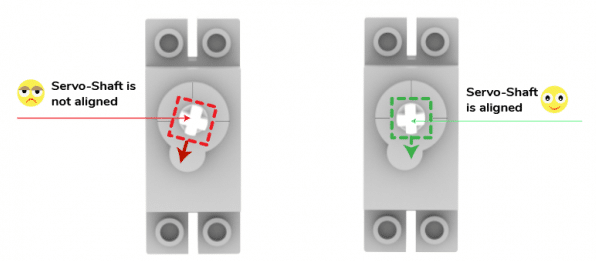
- Click on the green flag over the stage to run the script. You will find that the servo motor shaft gets perfectly aligned.
- Remove the servo motor from Quarky and repeat the process for all 5 servos.
- Remove all the wooden parts from the plates and arrange them according to the Component List.
Note: Please carefully observe the orientation of the parts in the assembly steps.
Step 1: Robotic Arm Base Assembly Steps
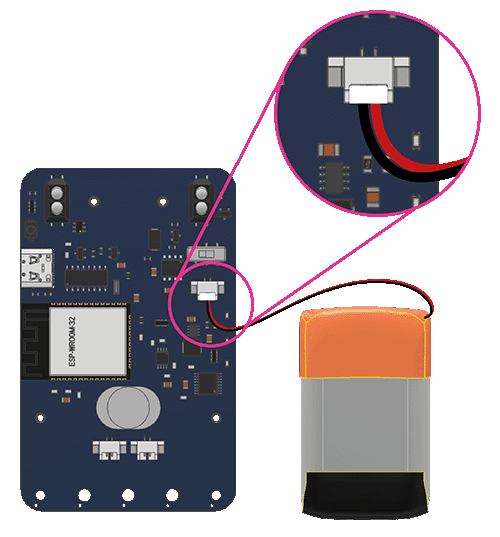
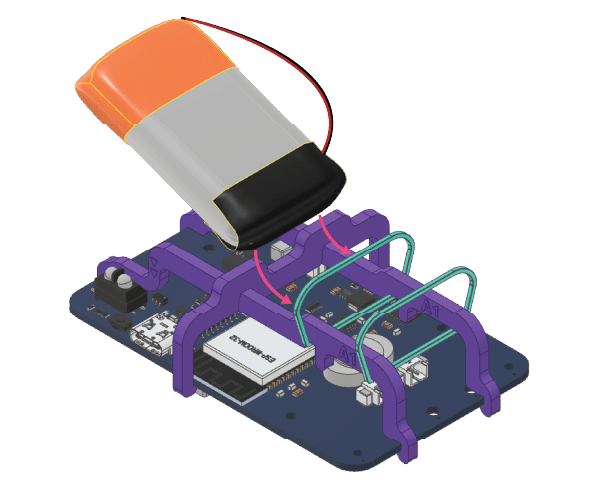
- Connect the Battery on the back side of the Quarky. Keep the red wire towards the right side.
- Pass both the A1 Purple Parts through two Rubber Bands. Mount and snap A1 Purple Parts on the back side of the Quarky.
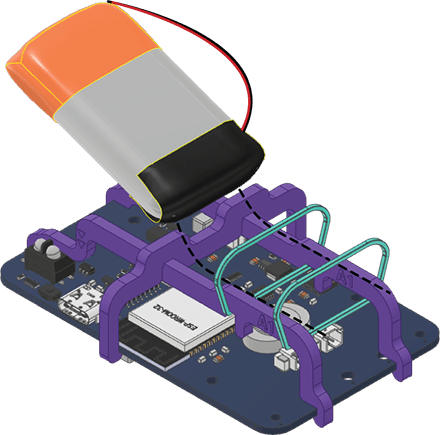
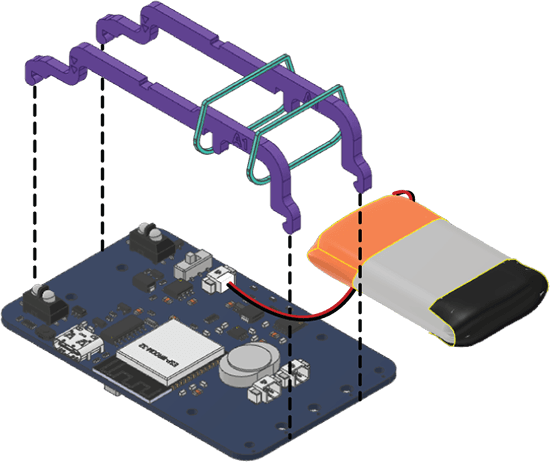
- Keeping the Rubber Bands towards the lower end of the A1 Purple Parts, snap the A2 Purple Part on the backside of the Quarky.
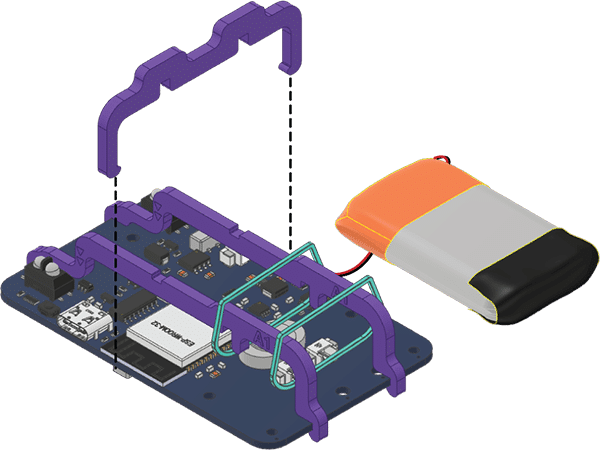
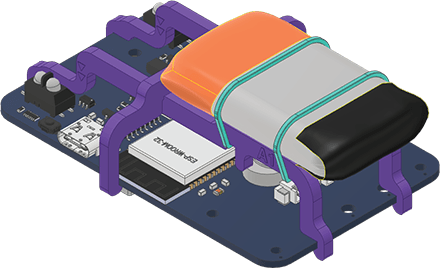
- Now, secure the Battery in between the Rubber Bands.
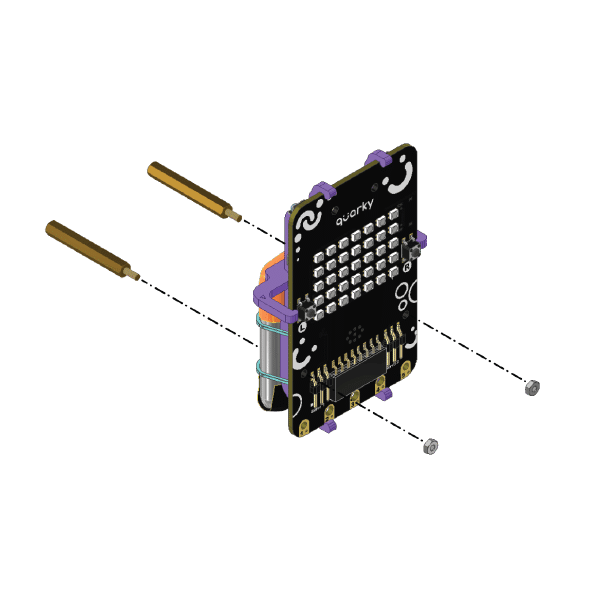
- Fix the M2 Metal Standoffs (30mm) on the backside of the Quarky using M2 Nuts.
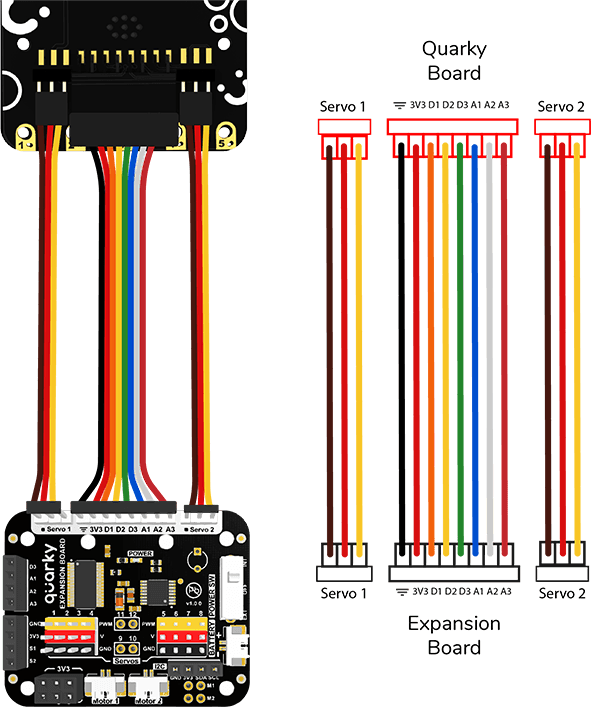
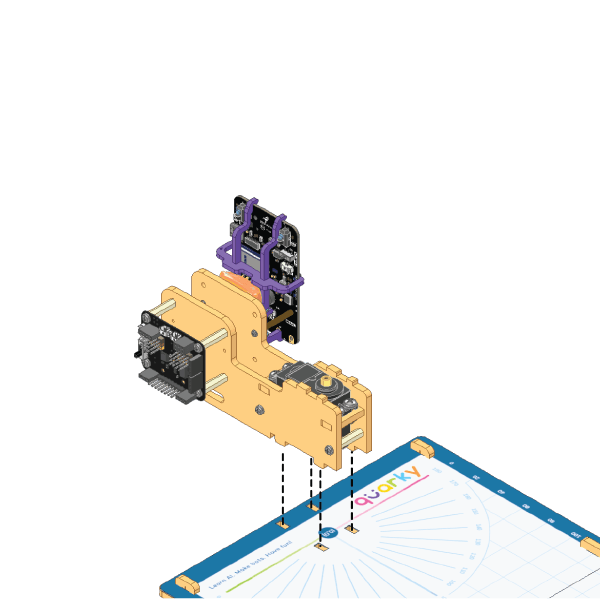
- Attach the set of Expansion Connectors to Quarky as per the Wiring diagram.
- Insert the Expansion Connectors through the slot on a Base Side from the front side, and fix the assembled quarky to the Base Side using M2 Bolts (6mm).
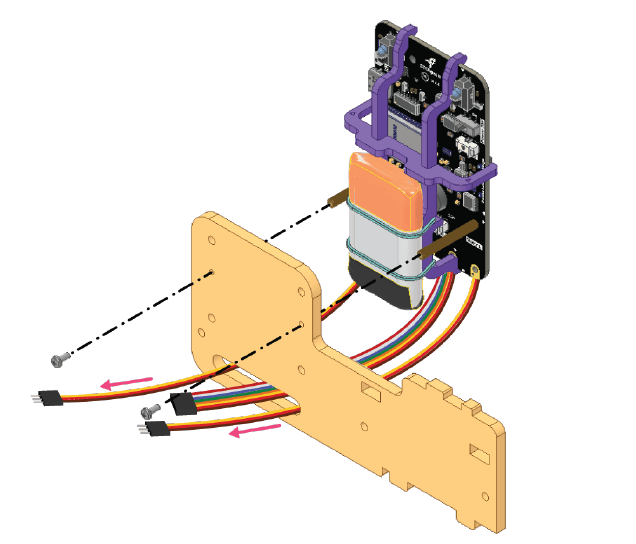
- Fix M3 Spacers (20mm) on the backside of the other Base Side with Quarky using M3 Bolts (8mm).
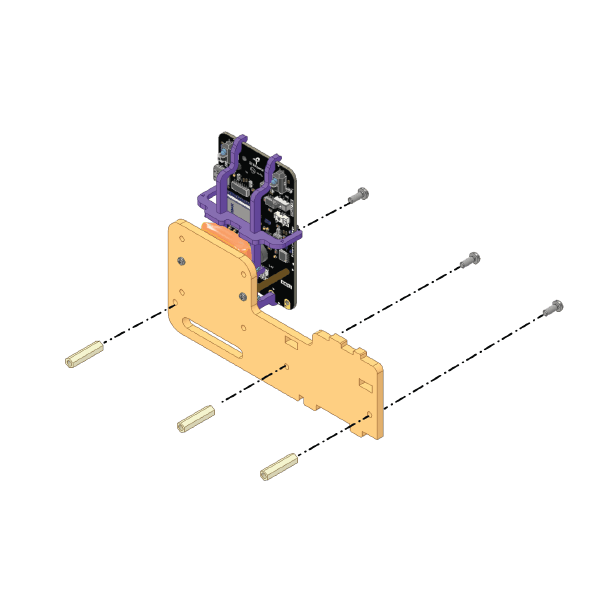
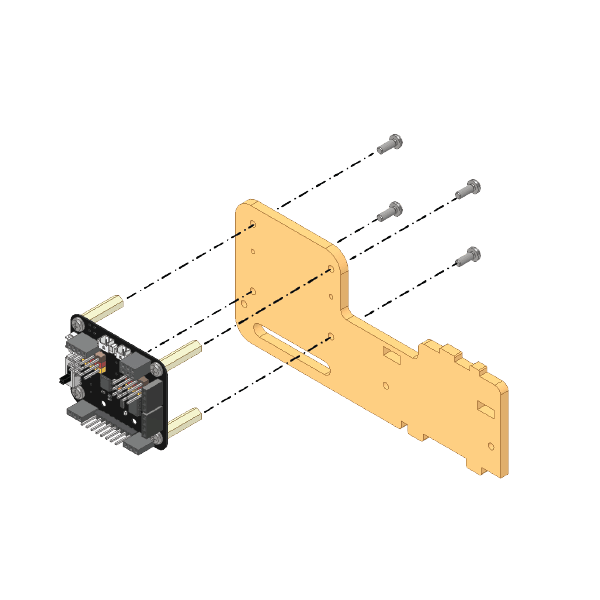
- Fix the M3 Spacers (20mm) on the backside of the Quarky Expansion Board using M3 Bolts (6mm).

- Now, on another Base Side fix the assembled Quarky Expansion Board using M3 Bolts (8mm).
- Now, fix Servo Mounts on Metal Servo Motor using M4 Bolts (12mm) and M4 Nuts.
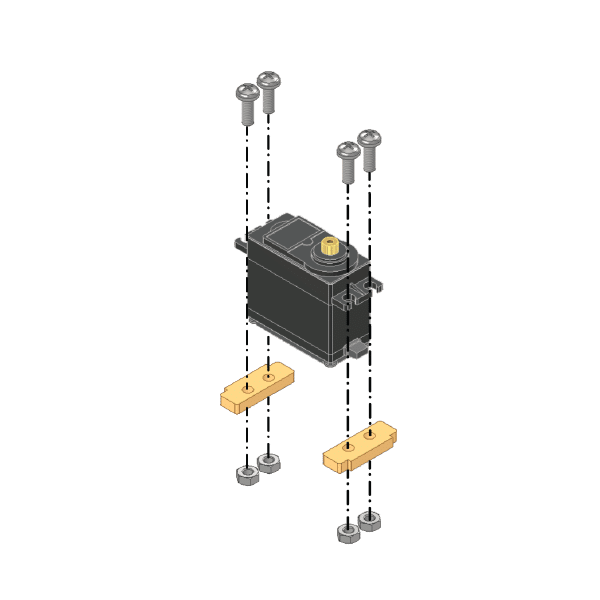
- Fix the Servo Mounts attached to Metal Servo Motor into the slot on the Base Side with Quarky.
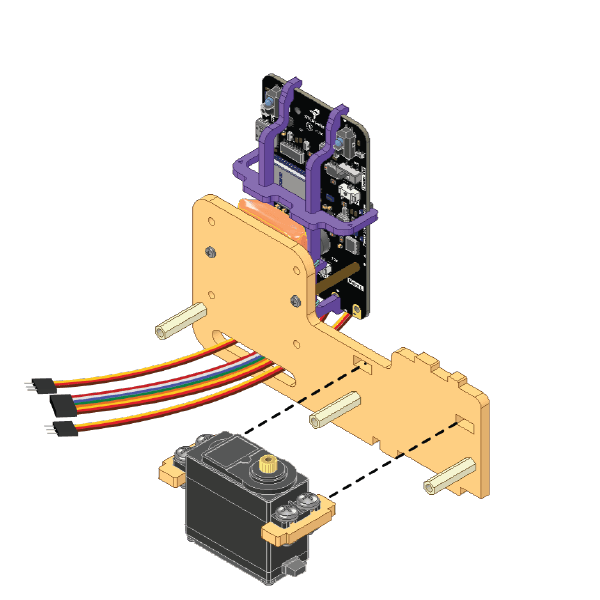
- Attach the Base Side with the Quarky Expansion Board to the other end of the Spacers on Base Side with Quarky and fix the Servo Mounts between the Base Sides using M3 Bolts (8mm).
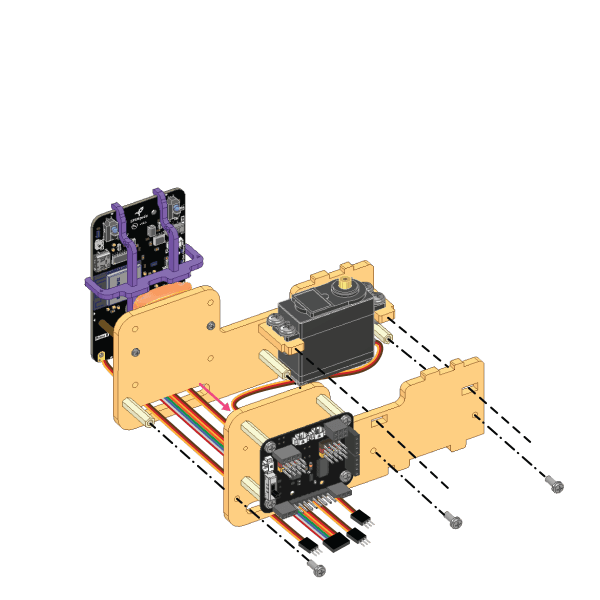 Note: Pass the Expansion Connectors and Metal Servo Motor wire through the slot on the Base Side of the Quarky Expansion Board.
Note: Pass the Expansion Connectors and Metal Servo Motor wire through the slot on the Base Side of the Quarky Expansion Board. - Now, attach Base Jigsaw 1 and Base Jigsaw 2.
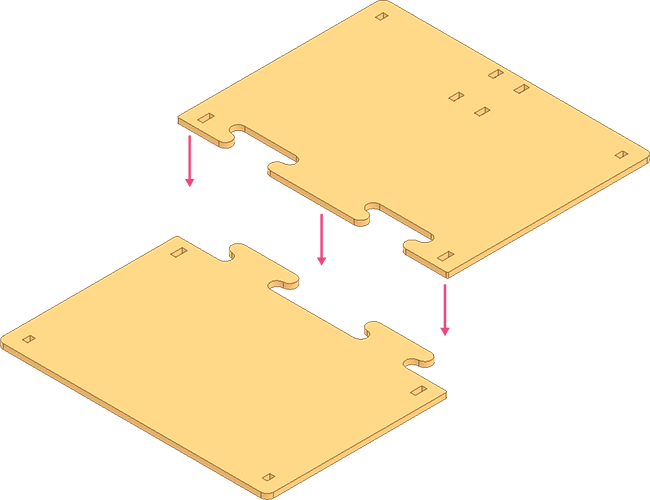
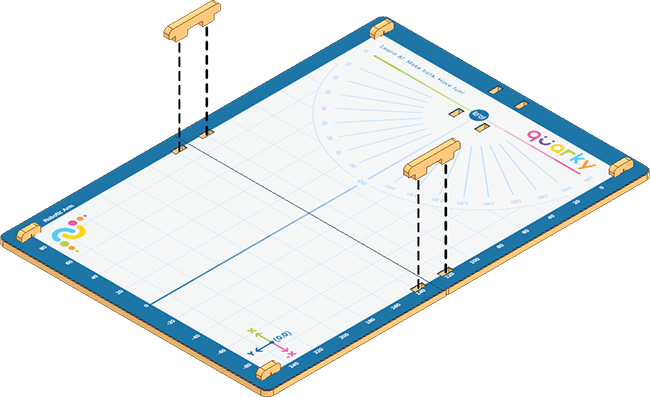
- Align and attach the first half of the Workspace Graph to Base Jigsaw 1 and pin it using two Wooden Paper Pins.
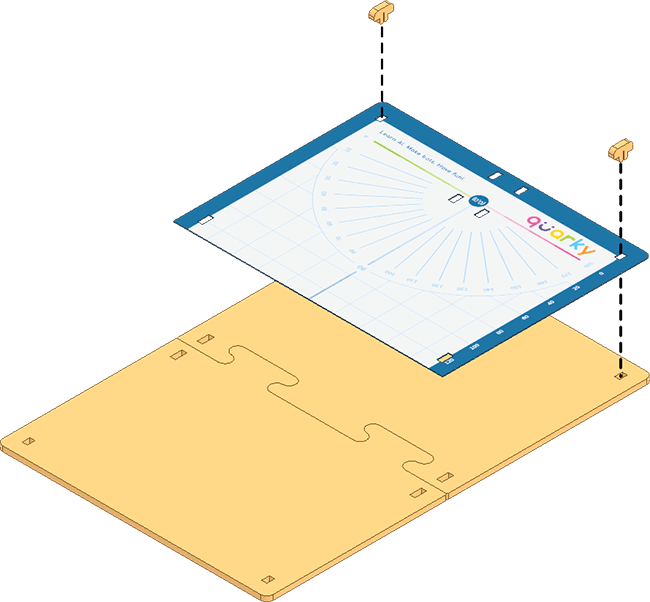
- Align and attach the second half of the Workspace Graph to the Base Jigsaw 2 and pin it using two Wooden Paper Pins.
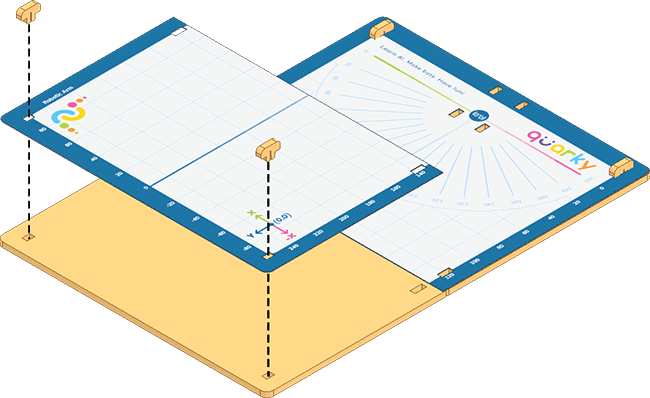
- Fix the Base Jigsaws and Workspace Graph using Base Plate Locks.
- Attach the Base Sides Assembly to the Base Jigsaw 1.
Step 2: Robotic Arm Shoulder Assembly Steps
- Fix the Assembled Bearing on the teeth of the Base Sides.
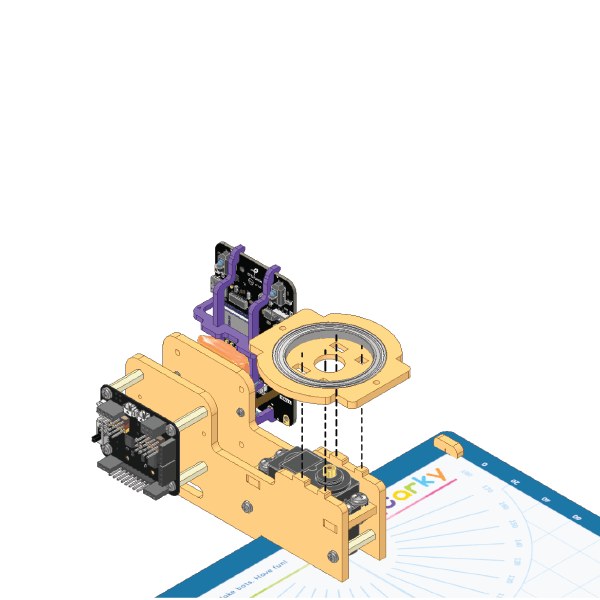
- Fix the Shoulder Base to the shaft of the Metal Servo Motor and Assembled Bearing using M3 Bolts (12mm) and M3 Nuts.
Note: Please keep the Shoulder Base perpendicular to the Metal Servo Shaft.
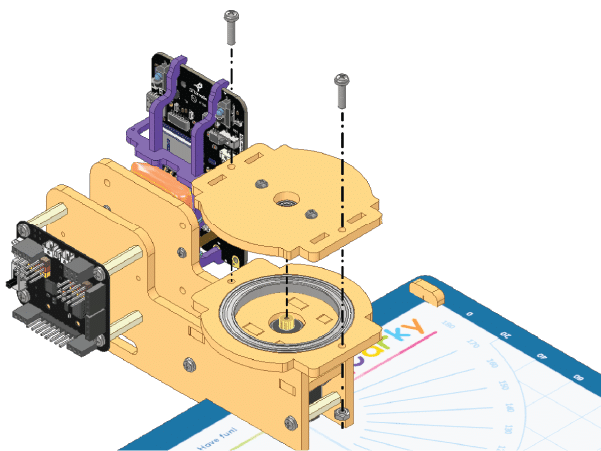
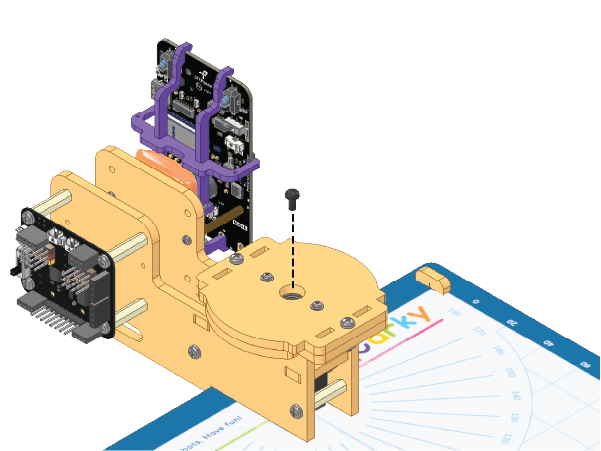
- Now, using a Black M3 bolt (5mm) from the metal servo motor accessories, fix the assembly to the Metal Servo Motor Shaft.
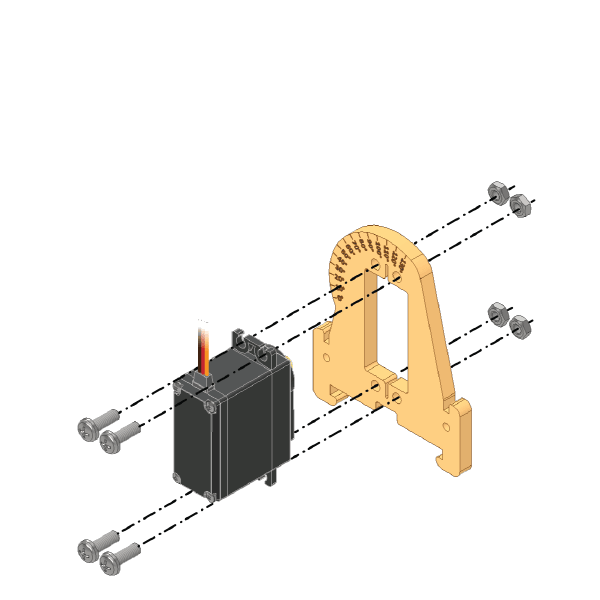
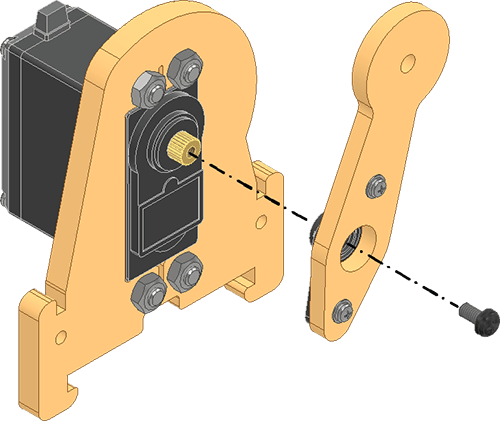
- Fix the Metal Servo Motor on the marked side of Servo Shoulder 1 using M4 Bolts (12mm) and M4 Nuts as shown in the below image.
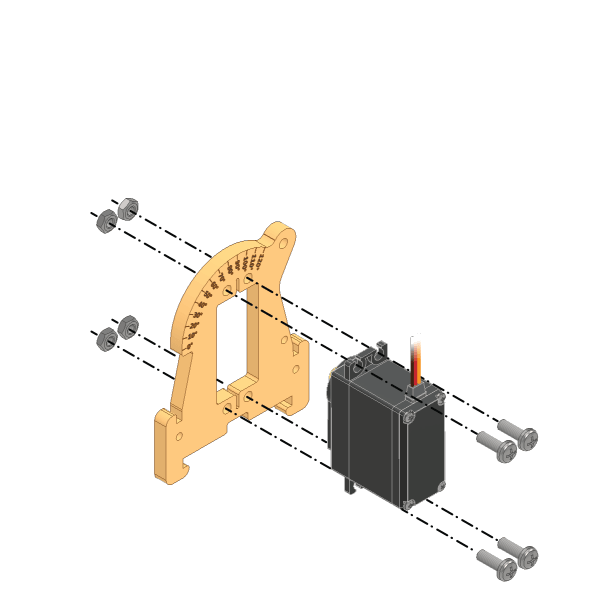
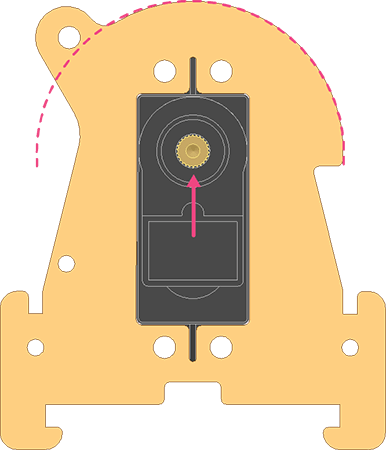
- Fix the Metal Servo Motor on the marked side of Servo Shoulder 2 using M4 Bolts (12mm) and M4 Nuts as shown in the below image.
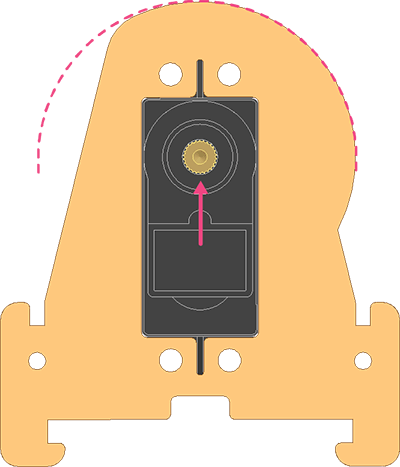 Note: Insert the Metal Servo Motor from the side numbers written on the Servo Shoulder 2 and also keep the Servo Shaft towards the circular profile of the Servo Shoulder 2.
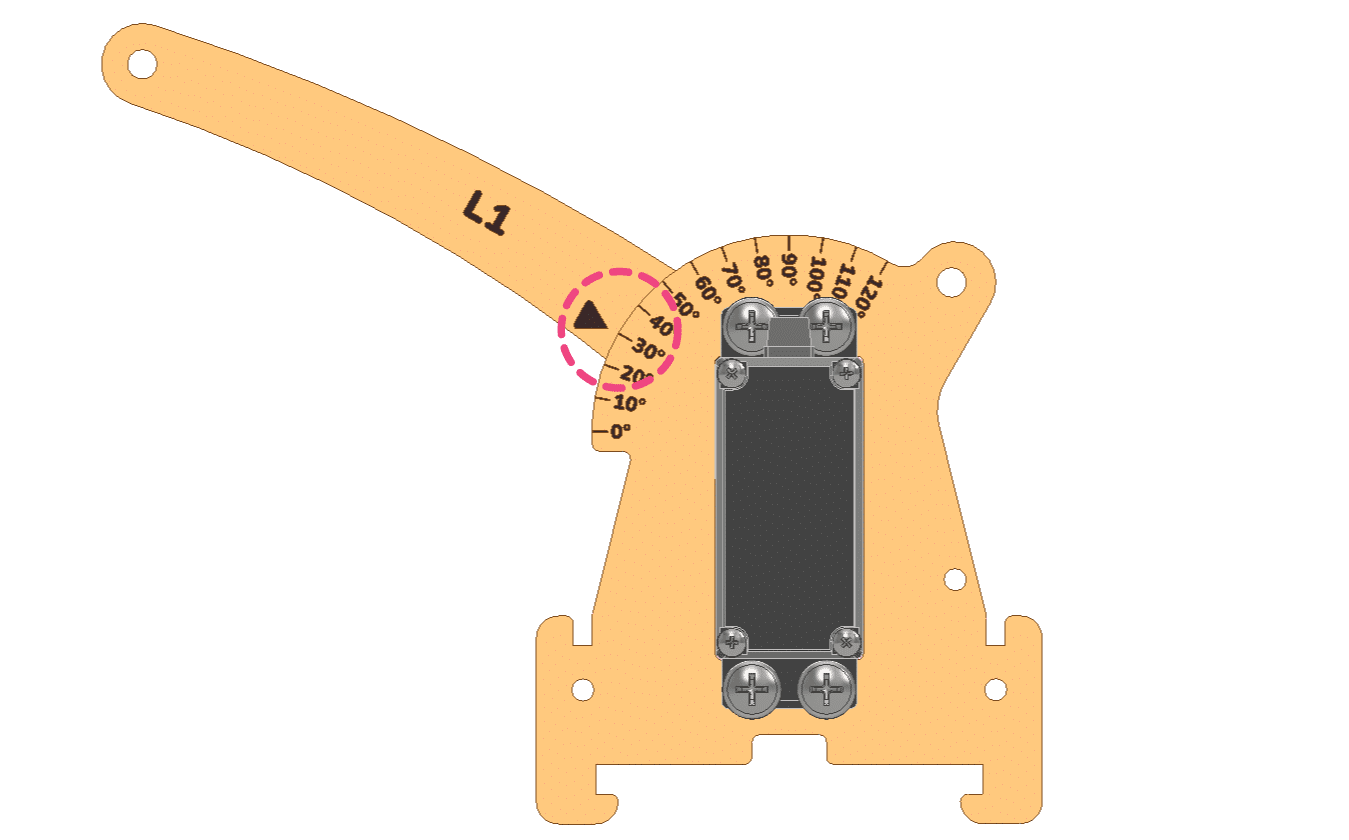
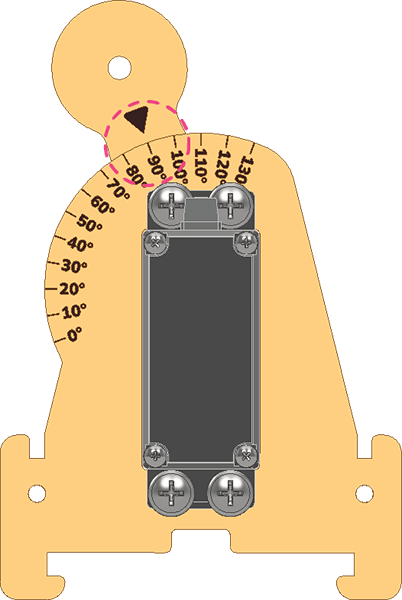
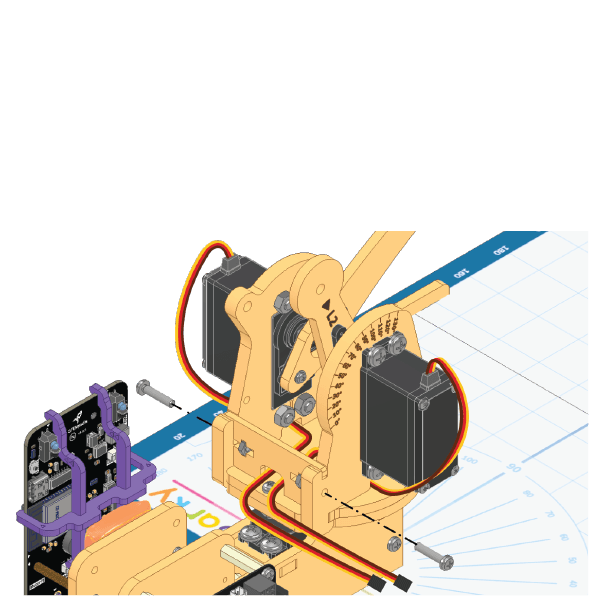
Note: Insert the Metal Servo Motor from the side numbers written on the Servo Shoulder 2 and also keep the Servo Shaft towards the circular profile of the Servo Shoulder 2. - Fix the Link 1 (L1) to the Metal Servo Motor on the Servo Shoulder 1 and align the triangular mark on Link 1 (L1) at 30° using Black M3 bolt (5mm).
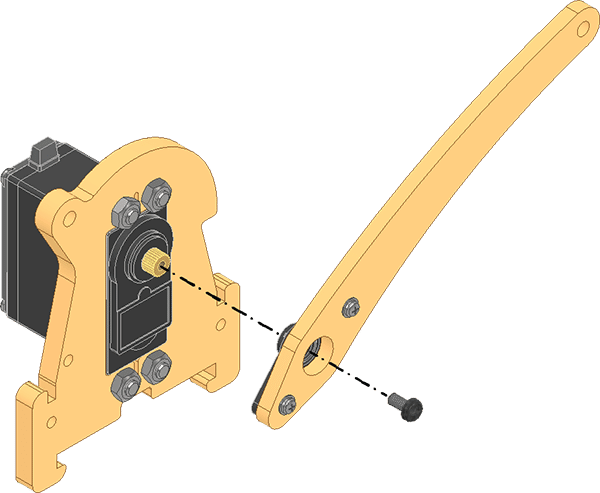
- Fix the Link 2 (L2) to the Metal Servo Motor on the Servo Shoulder 2, and align the triangular mark on the Link 2 (L2) at 90°, using the black M3 Bolt (5mm).
- Attach the Servo Shoulder 1 on the Shoulder Base.
Note: Pass and hold the Metal Servo Motor wire from the wiring slot on the Servo Shoulder 1 while assembling.
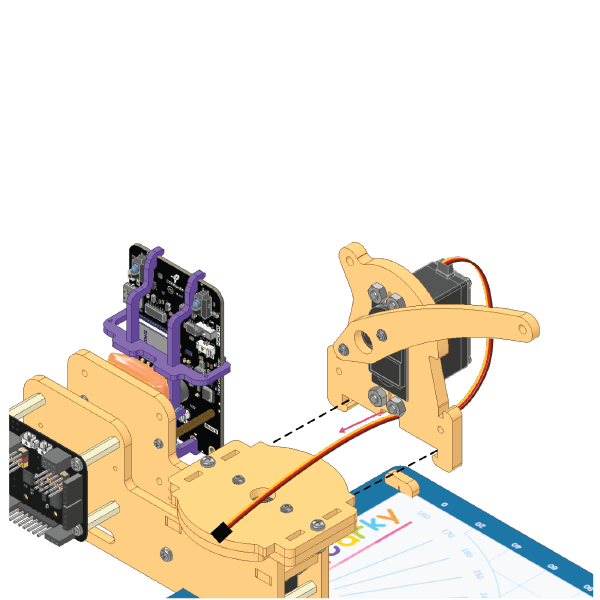
- Attach the Servo Shoulder 2 on the Shoulder Base.
Note: Pass and hold the Metal Servo Motor wire from the wiring slot on the Servo Shoulder 2 while assembling.
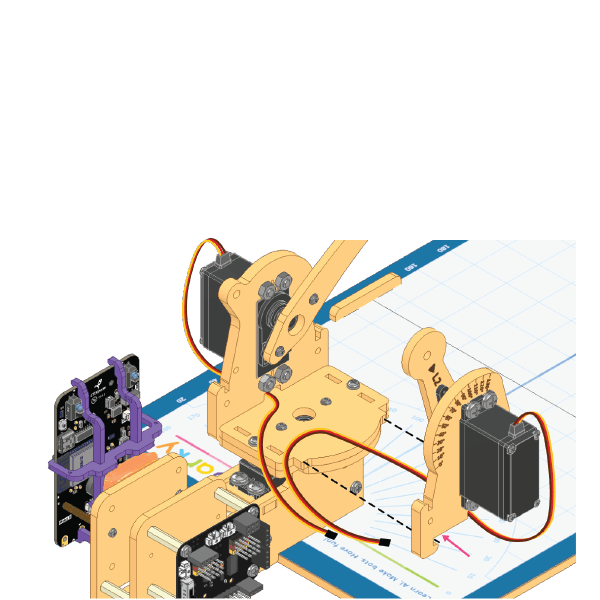
- Insert M3 Nuts into the slots in Shoulder Supports.
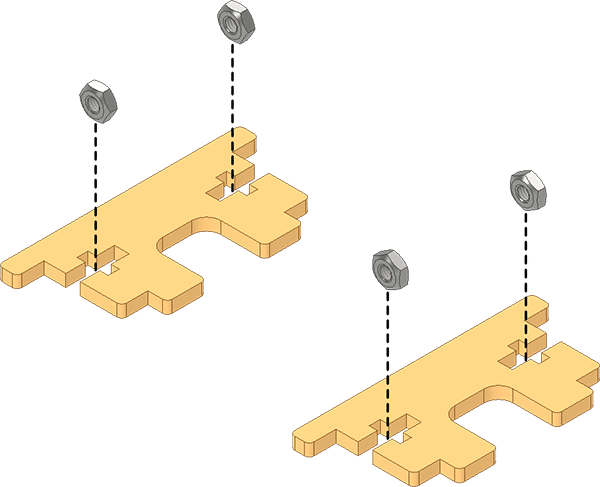
- Attach the Shoulder Support on the front side of the Shoulder Base and fix it using M3 Bolts (12mm).
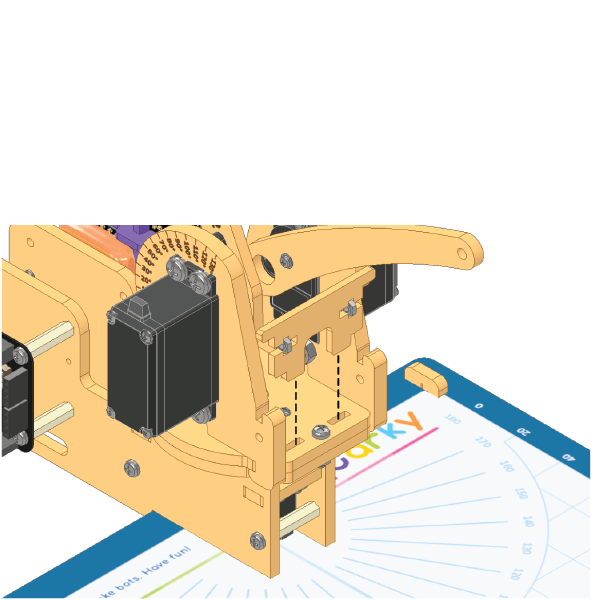
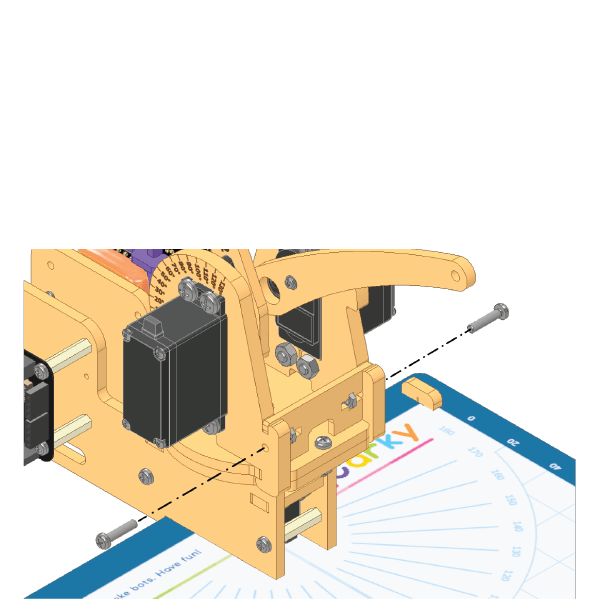
- Attach the Shoulder Support on the back side of the Shoulder Base and fix it using M3 Bolts (12mm).
Note: Pass the Metal Servo Motor’s wires from the slot of the Shoulder Support at the back side before fixing it on the Shoulder Base.
Step 3: Robotic Arm Gripper Assembly Steps
The entire Gripper Assembly will be assembled upside down. So, Please carefully observe the orientation of the parts in the assembly steps.
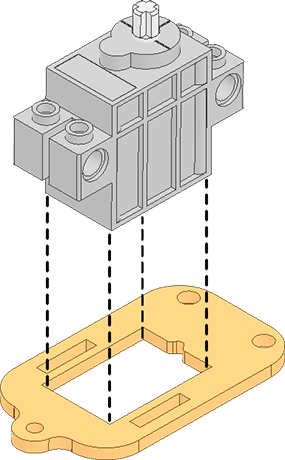
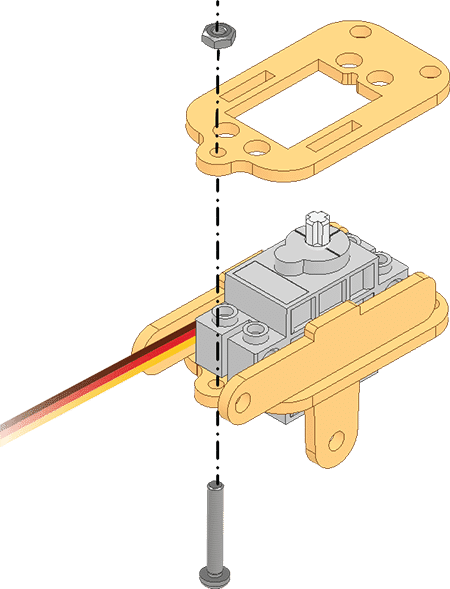
- Insert the 180° Servo Motor in the Gripper Top.
Note: Keep the shaft of the 180° Servo Motor towards the notch in the cut-out profile in the Gripper Top.
- Insert the Gripper Side 2 in the Gripper Top.
- Insert the Gripper Side 1 in Gripper Top.
- Insert M3 Bolt (20mm) through Gripper Top, 180° Servo Motor, and Gripper Bottom. Fix the assembly using M3 Nut.
Note: Do not overtighten the M3 Nut and Bolt.
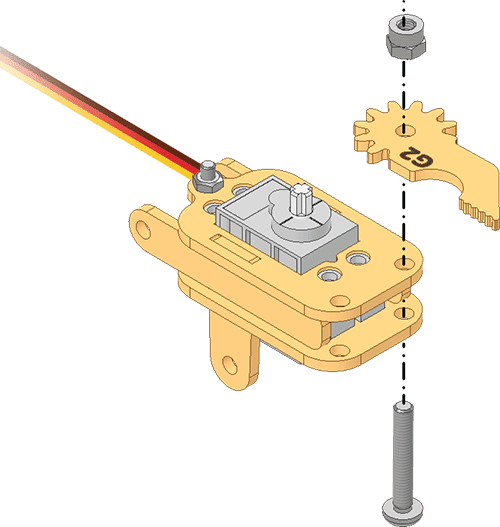
- Fix Gripper 2 (G2) on the Gripper Bottom using M4 Bolt (25mm) and M4 Lock Nut with spanner.
Note: Once everything is fitted together, slightly loosen the M4 Bolt (25 mm) to allow the gripper to rotate freely on the Gripper Bottom.
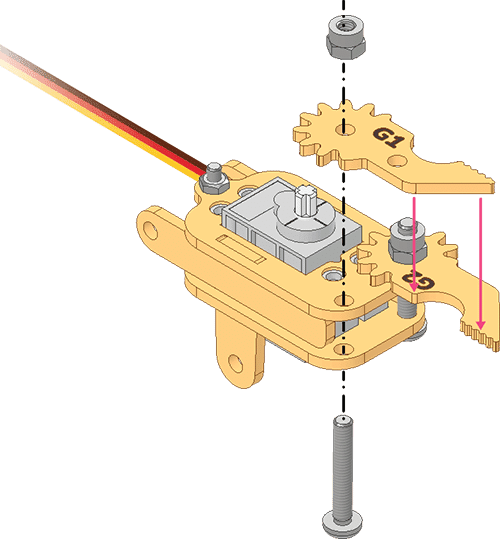
- Fix Gripper 1 (G1) on the Gripper Bottom using an M4 Bolt (25mm) and M4 Lock Nut with a spanner.
Note: Align the teeth of the gears G1 and G2 as shown before fixing them.
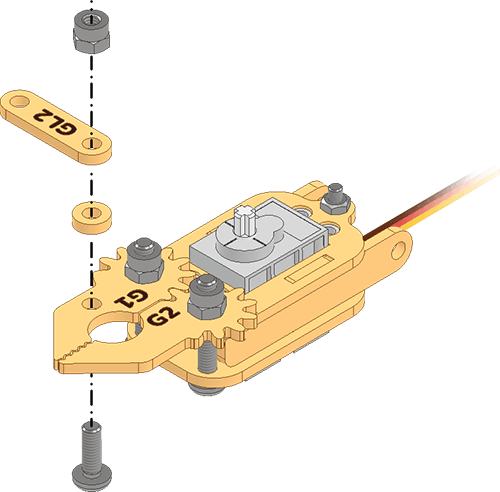
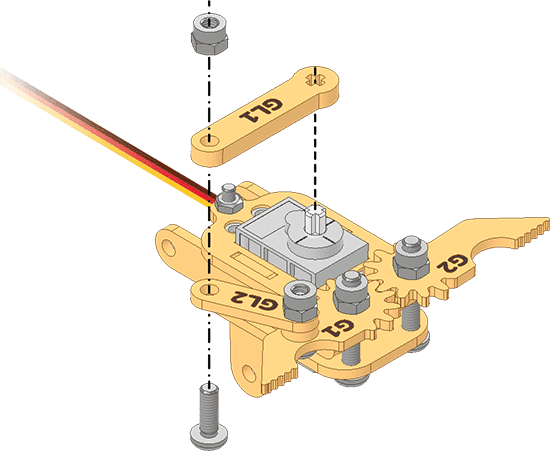
- Insert M4 Bolt (12mm) through Gripper 1 (G1), Gripper Spacer and Gripper Link 2 (GL2). Now fix the assembly using M4 Lock Nut by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the M4 Lock Nut and Bolt. Keep it slightly loose.
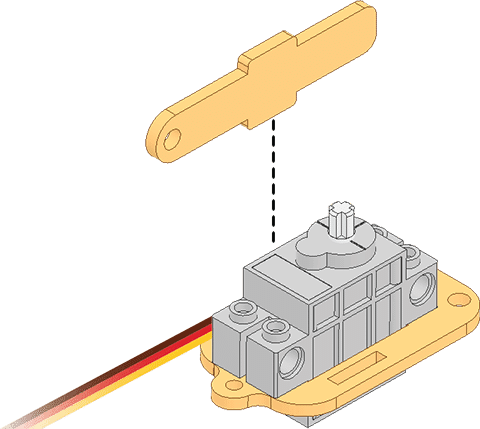
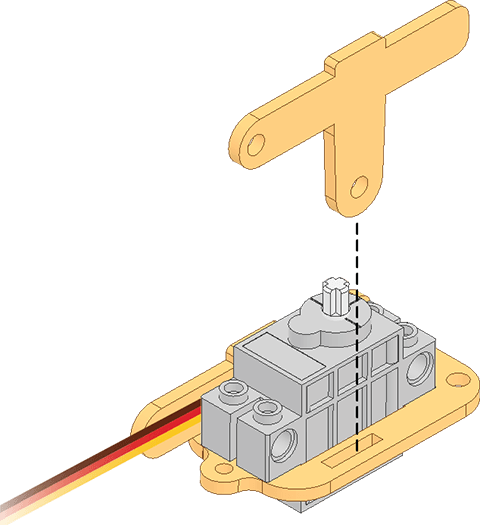
- Attach one end of Gripper Link 1 (GL1) to the shaft of the 180° Servo Motor and the other end to Gripper Link 2 (GL2) using an M4 Bolt (12mm) and M4 Lock Nut by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the M4 Lock Nut and Bolt. Keep it slightly loose.
Step 4: Robotic Arm Link Assembly Steps
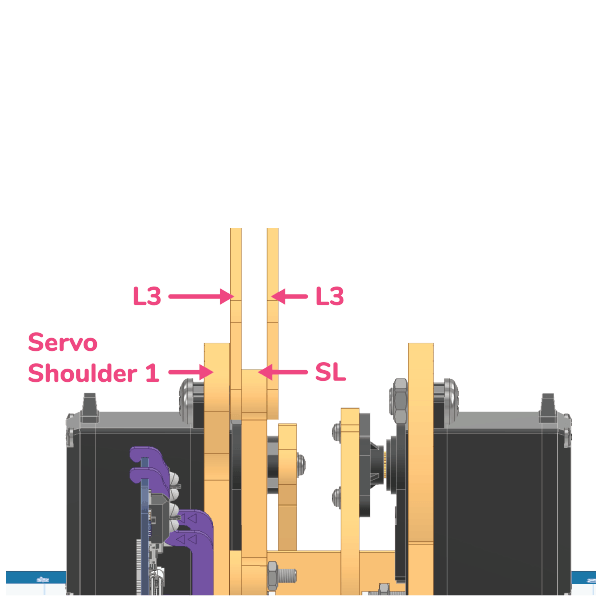
- Insert a M3 Bolt (20mm) through Servo Shoulder 1, Spacer and Support Link (SL). Now fix the assembly using M3 Nut.
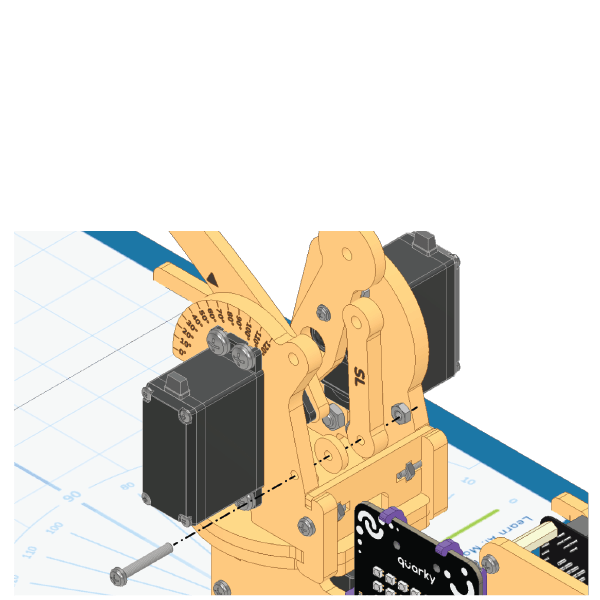
- Insert M4 Bolt (25mm) through the other end of Servo Shoulder 1, Link 3 (L3), Support Link (SL) and Link 3 (L3). Now fix the assembly using M4 Lock Nut by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the Lock Nut and Bolt. Keep it slightly loose.
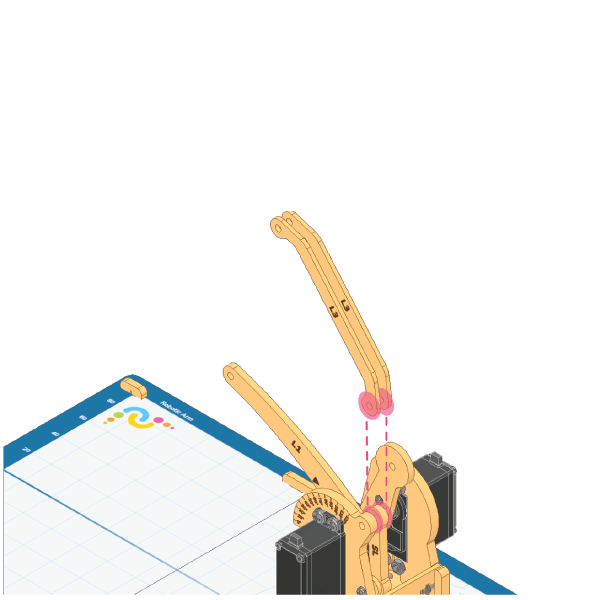
- Now, for the other side, attach Link 4 (L4) to Link 2 (L2) using M4 Bolt (12mm) and M4 Lock Nut by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the Lock Nut and Bolt. Keep it slightly loose.
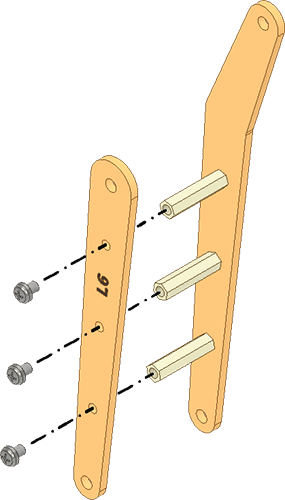
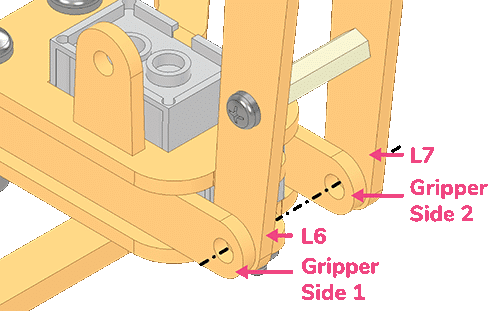
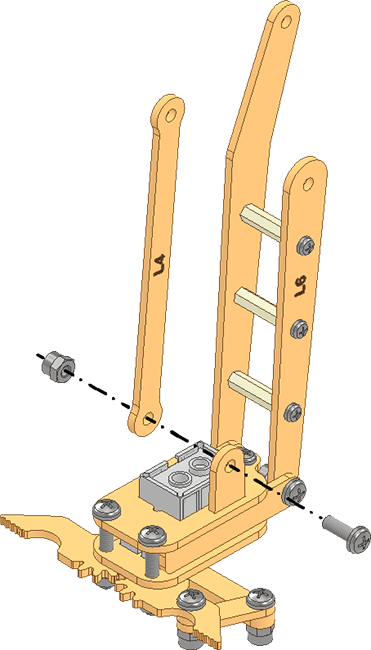
- Fix the three M3 Spacers (20mm) on L7 (Link 7) using M3 Bolts (6mm).
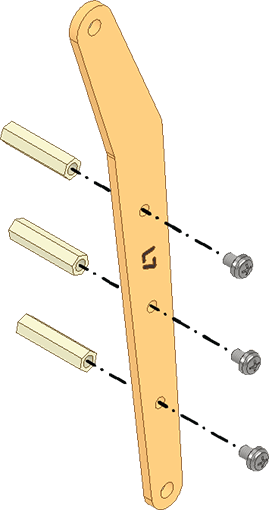
- Then fix Link 6 (L6) to the M3 Spacers (20mm) on Link 7 (L7) using M3 Bolts (6mm).
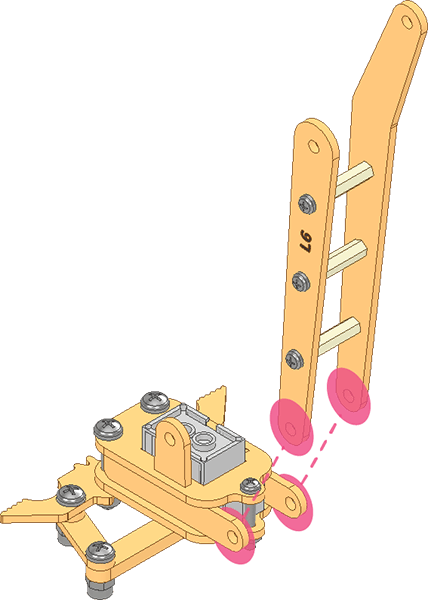
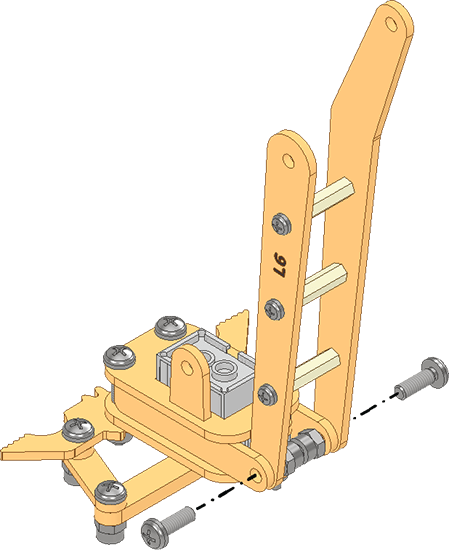
- Attach the Gripper assembly to the Link 7 (L7) and Link 6 (L6) assembly using M4 Bolt (35mm) and M4 Lock Nut by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the Lock Nut and Bolt. Keep it slightly loose.
- Attach the other Link 4 (L4) to the Gripper assembly using M4 Bolts (12mm) and M4 Lock Nuts by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the Lock Nut and Bolt. Keep it slightly loose.
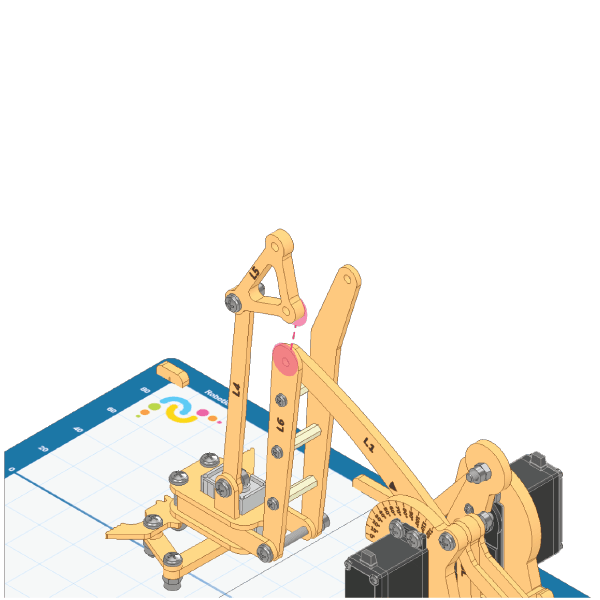
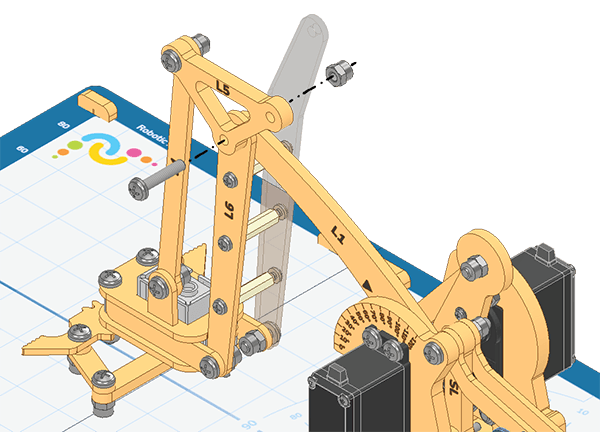
- Attach Link 5 (L5) to Link 4 (L4) using M4 Bolts (16mm) and M4 Lock Nuts by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the Lock Nut and Bolt. Keep it slightly loose.
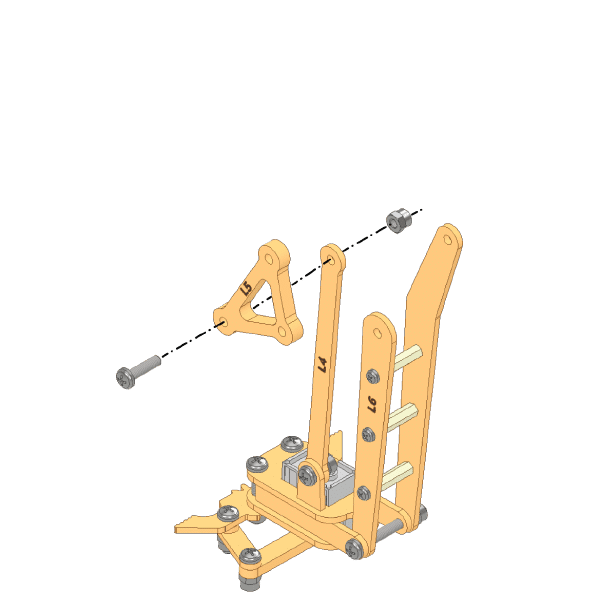
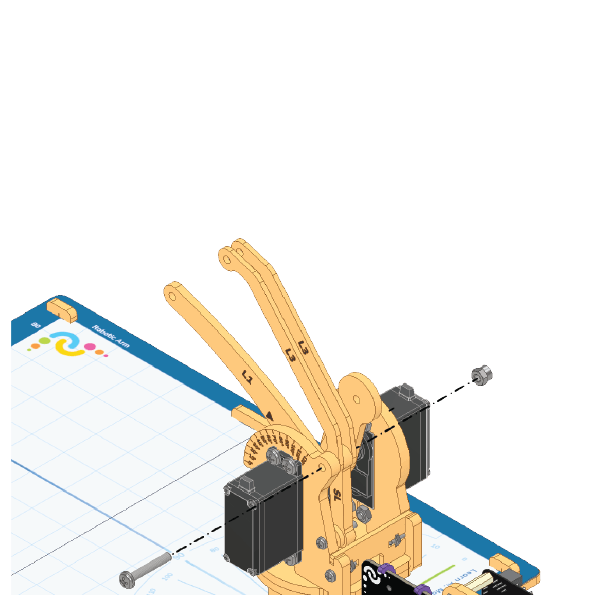
- Attach Link 5 (L5), and Link 6 (L6) to Link 1 (L1) using an M4 Bolt (20mm) and M4 Lock Nut by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the Lock Nut and Bolt. Keep it slightly loose.
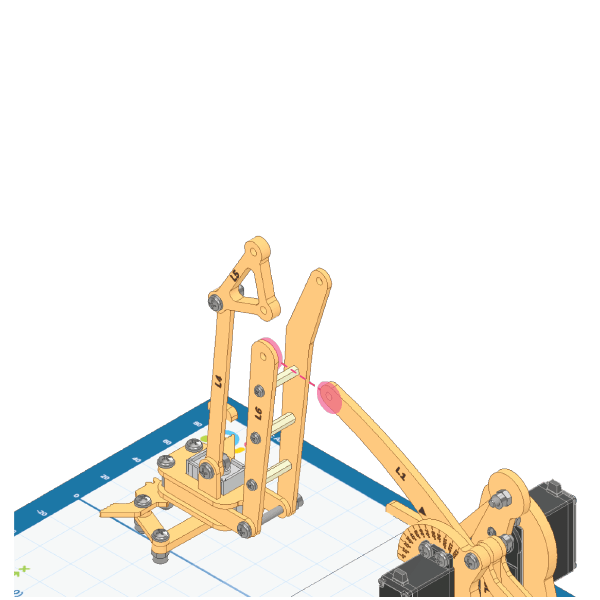
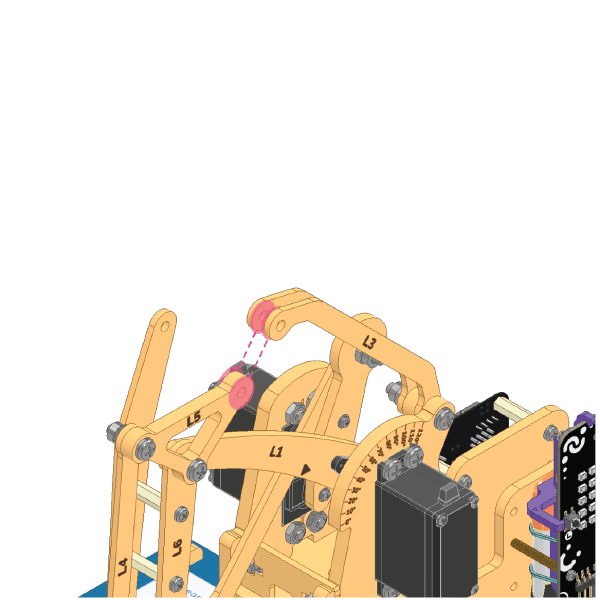
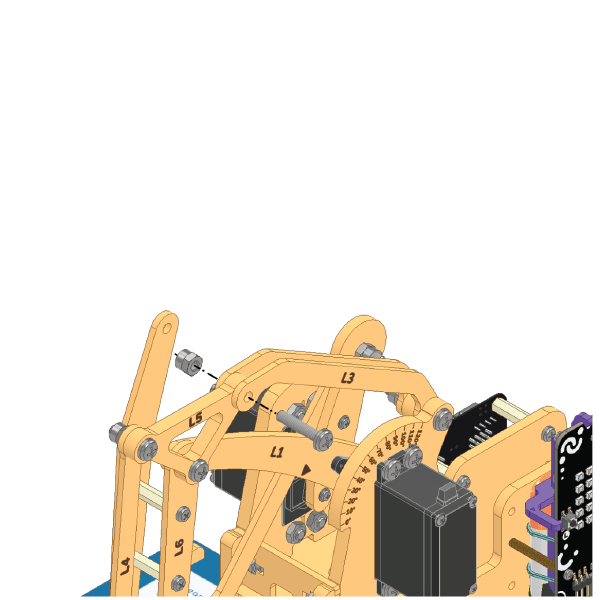
- Insert M4 Bolt (16 mm) through Link 3 (L3), Link 5 (L5) and Link 3 (L3) using an and M4 Lock Nut by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the Lock Nut and Bolt. Keep it slightly loose.
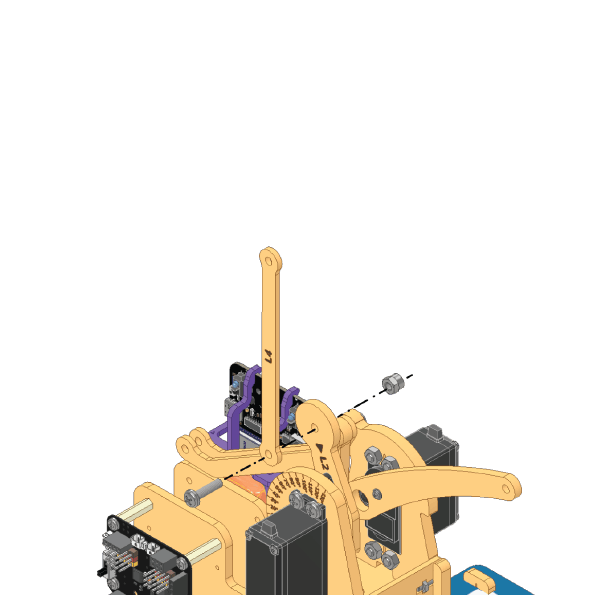
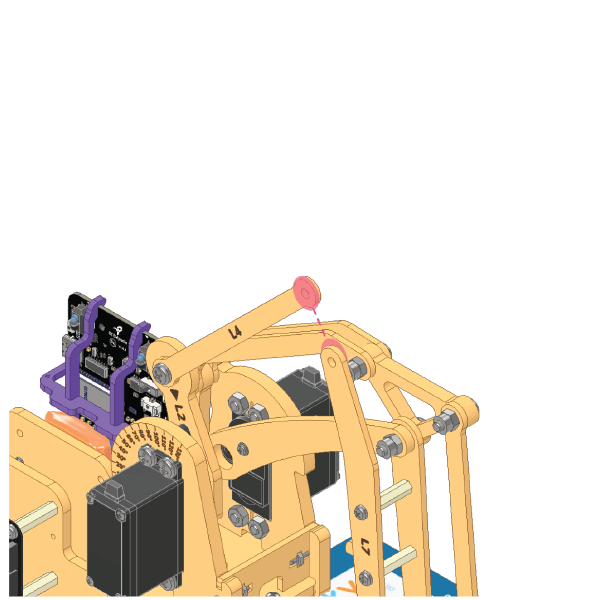
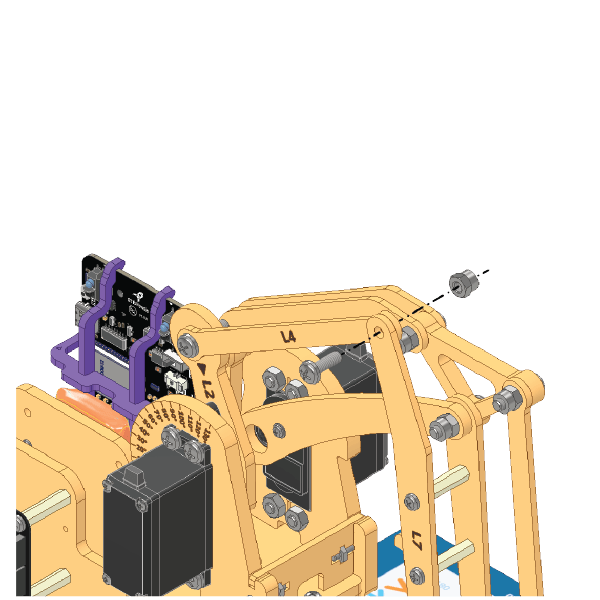
- Attach the Link 4 (L4) to Link 7 (L7) using an M4 Bolt (12mm) and M4 Lock Nut by holding it with spanner.
Note: Use the M4 Lock Nut Spanner and remember not to overtighten the Lock Nut and Bolt. Keep it slightly loose.
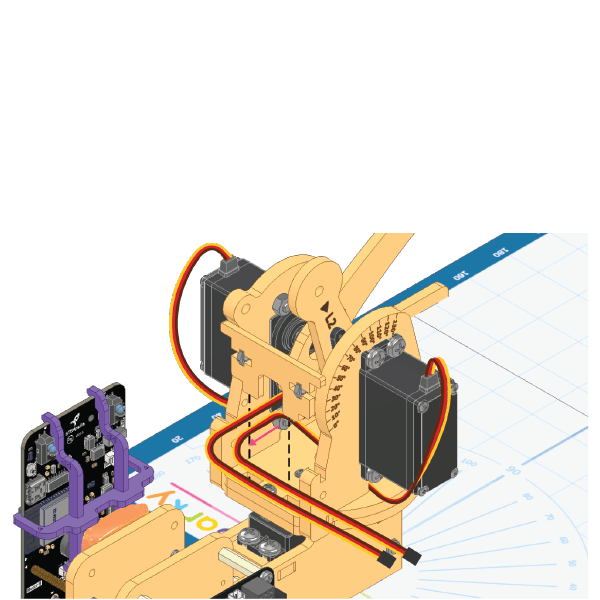
Step 5: Final Assembly
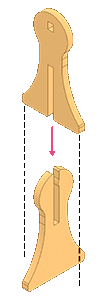
- Attach the Pawn Piece 1 to the Pawn Piece 2.
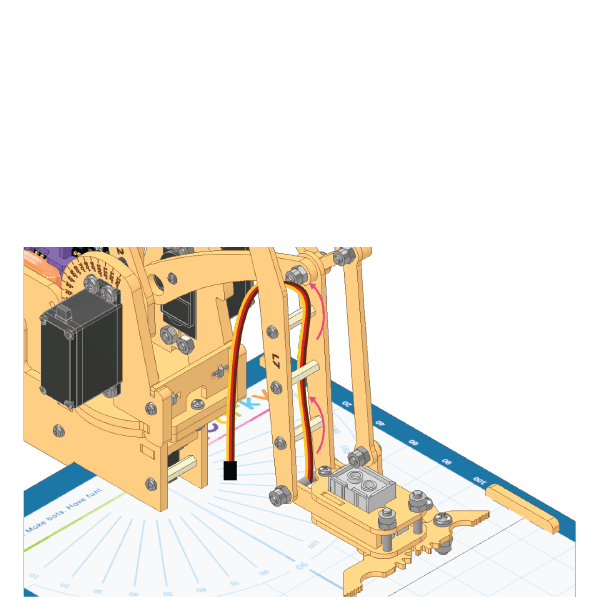
- Pass the wire of the Gripper’s 180° Servo Motor through the shown route and extend it using Jumper Cables.
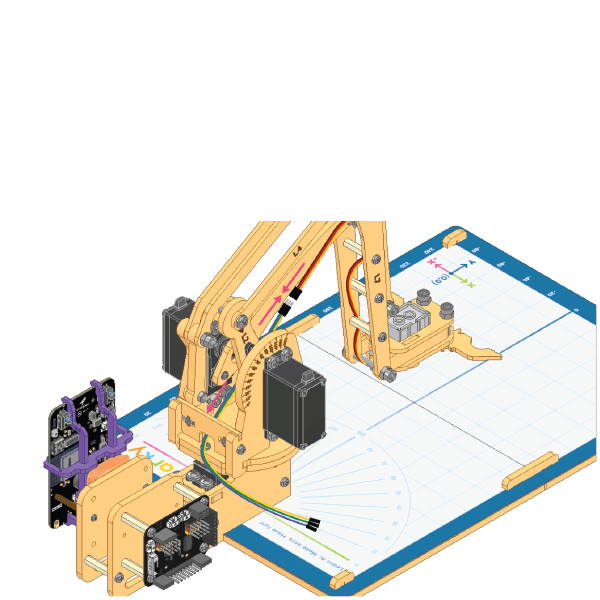
- Now, connect all the wires referring to the Wiring Diagram.
Your Robotic Arm assembly is complete.
Conclusion
Congratulations! You have now completed the assembly of the Quarky Robotic Arm! You can now use the Quarky Robotic Arm to explore more complicated programs and activities. With the knowledge you have acquired through this lesson, you can now customize and program your own Robotic Arm. Have fun!