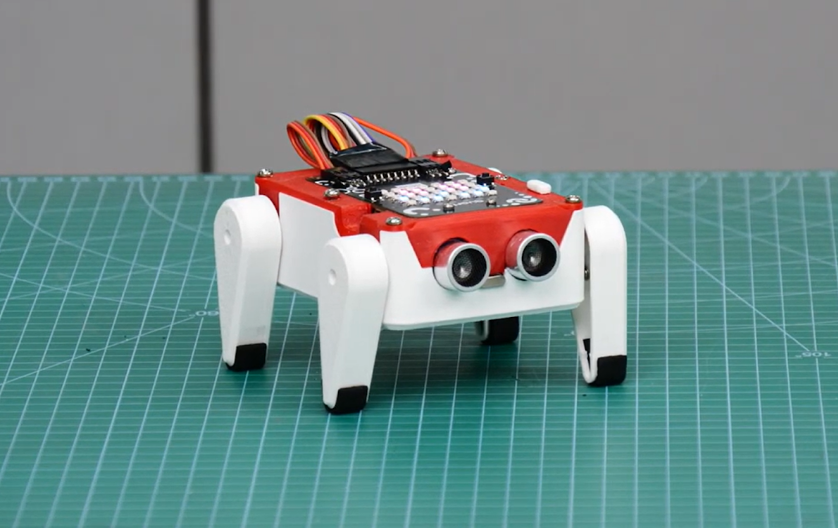

Bring your space to life with your very own 3D-printed desk companion! This guide walks you through the compact assembly of the Robodog Mini, a cute and agile quadruped powered by 4 high-precision servo motors. Learn how to assemble its lightweight, 3D-printed body and calibrate its movement to create a lifelike, interactive robot friend that fits right on your desk.
Bring your space to life with your very own 3D-printed desk companion! This guide walks you through the compact assembly of the Robodog Mini, a cute and agile quadruped powered by 4 high-precision servo motors. Learn how to assemble its lightweight, 3D-printed body and calibrate its movement to create a lifelike, interactive robot friend that fits right on your desk.