Introduction
In this project, we will be creating a script to control our robotic arm wirelessly using the dabble application via Bluetooth. This project requires the code to be uploaded into the quarky board, so once we do so, there is no need to connect Quarky with any laptop, it will work independently via dabble.
We will first understand how to operate Dabble and how to modify our code according to the requirements. The following image is the front page of the Dabble Application.
Select the Gamepad option from the Home Screen and we will then use the same gamepad to control our Robotic Arm.
Let’s Code
- Open pictoblox and create a new file in block coding.
- Go to the boards tab and select Quarky board.
- Go to extension and select Robotic arm and Dabble extension for this project.
- lastly, switch from stage mode to upload mode.
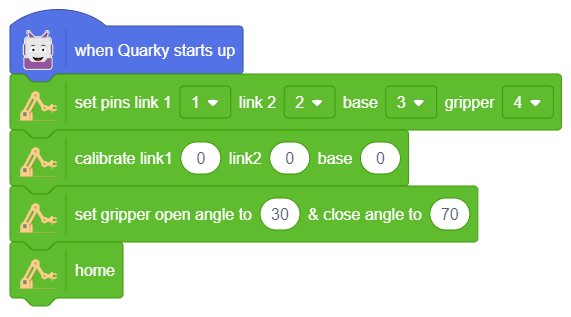
- Use when quarky startup event to write script.
- initialize the pins connections, calibration, and gripper angles for the robotic arm shown below.
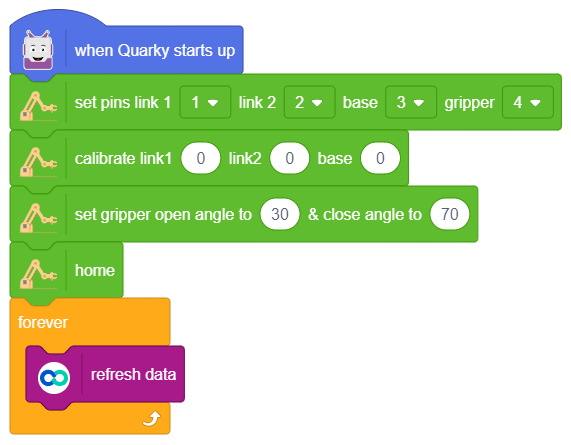
- Add the forever block from the controls palette and refresh the Bluetooth data sing the refresh block.
- Now use the if block in nested form to define the controls for the robotic arm. as shown below.
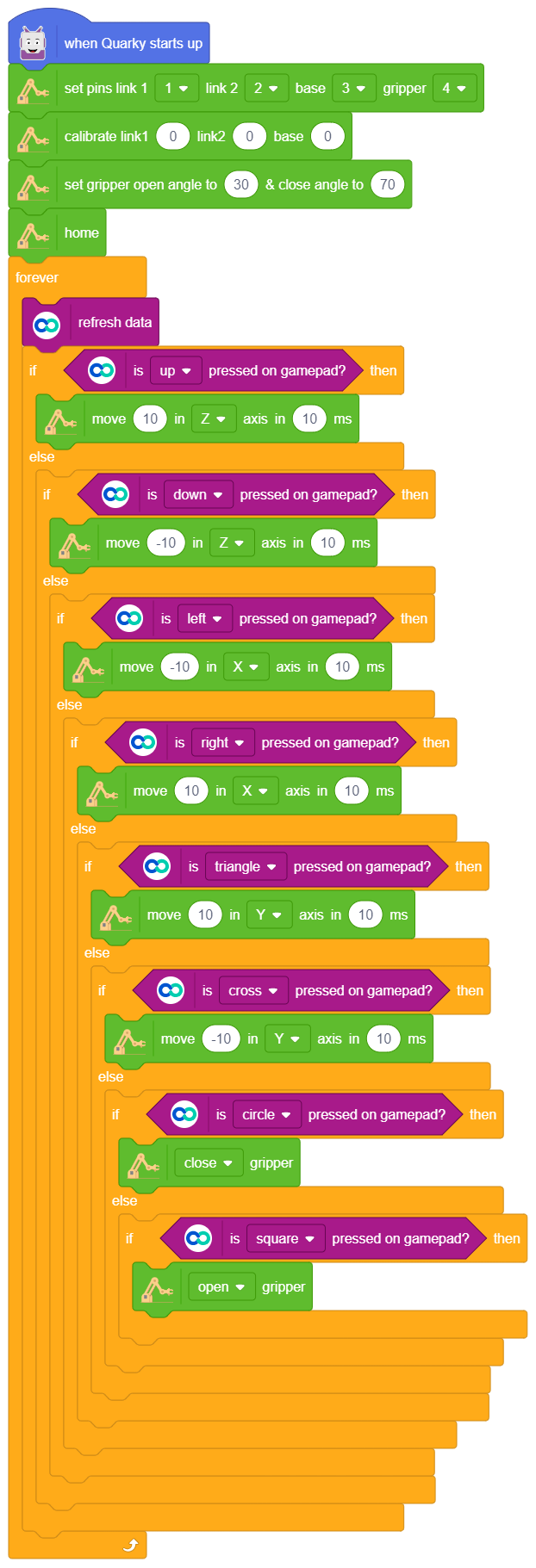
- This is the complete script for this activity, now connect your quarky via USB and upload the code twice.
with this you can completed this activity and now you can control your quarky using the dabble application.